Controller is a combination of hardware device and software program in control system that manages the flow of data from one entity to another and generates required output . Their are several techniques or algorithms that uses in automation system to control a system. One of the type that is used in PID controller is Proportional controller or P-only controller. This is the simplest closed loop feedback control.
Proportional Controller
In engineering and process control system, proportional controller is applied to the controlled variable to minimize the error proportionally to the difference between the desired value (setpoint, SP) and the measured value (process variable, PV). And from this technique or algorithm, we can create a proportional controller. This controller compares two values, difference SP and PV and the actual value, and minimizes the fluctuation of process variable. This is the fastest among the other controller but it can not always bring the desired set point of the system.
Proportional Controller Feedback Diagram

feedback diagram of proportional controller
Working of Proportional Controller
The proportional controller initially compares the Set Point (SP) value with the actual Process Variable (PV) value. Following this, the system’s feedback loop becomes operational, continuously monitoring the system’s output and comparing it to the desired output. As necessary, the inputs are modified to minimize the disparity between the output and the desired value.
Subsequently, the controller generates an error signal, which is then multiplied by a proportional gain factor. This multiplication yields an output that is proportionate to the error signal and endeavors to bring the system closer to the desired value. The feedback loop plays a pivotal role in ensuring the system’s ability to adapt to changing conditions and maintain a stable output, even in the face of internal or external disturbances. This text is free from plagiarism.
Gain Factor and Controller Output
Gain factor and controller output both are the two most important terms in a P controller.
Gain factor
This is a constant tuning parameter of P controller which is need to adjust to control the system response. In a proportional controller it is used as proportional gain or Kp. This Kp value is directly proportional to the changes in error signal. High Kp value means the the controller will react more strongly and faster in changes of error signal. And low Kp value means the controller will react slowly in changes of error signal.
Controller output
Controller output means the signal generated by the controller. It is denoted by ‘U’ . According to this output the system will take required action to get more closer answer of the set point.
Mathematical Representation of a Proportional Controller
Proportional controller produces output which is proportional to the error signal(E). So at a time ‘t’ the equation can be written as ,
U(t) ∝ E(t)
U(t) = Kp . E(t) ———–(i)
Taking Laplace in both side of equation no (i),
U(s) = Kp . E(s)
Farther this equation can be written as,
Kp = U(s) / E(s)
Therefore U(s) is the Laplace transform of controller output U(t), E(s) is the Laplace transform of error signal E(t) and Kp is the gain factor or proportional gain.
Tuning of Proportional Controller
Tunning refers the adjustment of Kp value to get most efficient output of process variable. The choice of Kp value effects the controller in terms of stability, speed overshot etc. Let’s consider a simple example of tuning process.
Suppose,
X-axis represents the time, and Y-axis represents the difference between setpoint and process variable.
When the Kp value is 0.5,
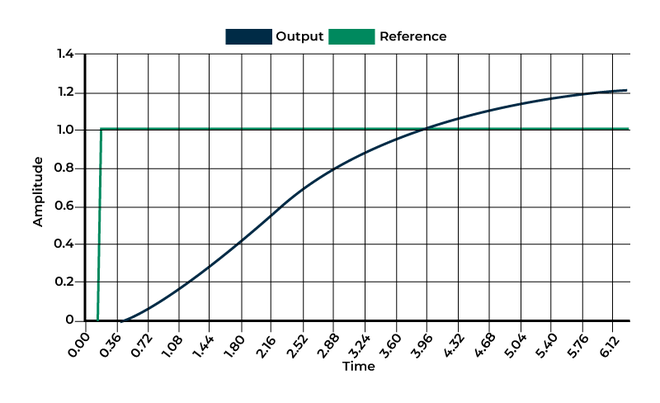
Kp=0.5
Lets again increase Kp value to 1.2,

Kp=1.2
Again increase the kp value to 1.3,

Kp=1.3
This process will be continued until to get the most perfect value of Kp and continue monitoring the system for any deviations and adjust Kp accordingly.
Examples of Proportional controller
P only controller or proportional controller is a closed loop feedback control system, where the controller adjust its output based on the difference between setpoint and process variable. So here are some examples of P only controller along with explanation and diagram.
- Fly-ball governor : The fly-ball governor is an example of proportional controller. There are some balls which rises with the speed of flow, and blocks the flow, and this is how it controls the flow rate.

fly-ball governor
- Adaptive cruise control : Adaptive cruise control is a widely recognized application of proportional control. In adaptive cruise control systems, the throttle input is continuously adjusted to respond to changes in road conditions, including both declining gradients and increasing momentum. Moreover, the vehicle’s throttle is dynamically regulated based on the distance to the vehicles ahead. In situations requiring emergency collision avoidance, a distinct proportional control system is engaged to gently apply the brakes when the proximity to a lead vehicle becomes too close, or more forcefully when necessary.
Adaptive cruise control is like a smart driving helper in your car. It uses proportional control to adjust how much gas the car gets. This helps the car handle different situations, like going up or down hills and staying a safe distance from the cars in front. If you get too close to any car, you can apply break to avoid any accidents and continue a smooth drive.
Application of Proportional Controller
Proportional control often used in industrial automation such as speed control, pressure control, flow control, PH control, level control, position control. But their are some major use of P controller, which described below.
- Temperature control : Proportional controller can be used to maintain a specific temperature and get the desired output. In this system, the controller adjusts the heating element temperature or power at a specific point to control the overall temperature and keep the temperature at setpoint. The controller calculates the setpoint and the current temperature difference, and then applies it to the gain factor(Kp).
Setpoint --------->[P controller/temperature control]--------->heating element
- Level control : P-only controller often used in many industries to control a specific water level in a tank . the controller monitor the water level through sensor, and adjusts it with the setpoint.
Setpoint ---------> [P controller] -----------> value of water flow
- Pressure control : Proportional controller also used in pneumatic system to control a specific pressure in the system.
Setpoint ---------> [P controller] -----------> Control valve
Advantages and Disadvantages of Proportional Control
Some advantages and disadvantages are as follows:
Advantages
- Simple and easy to implement
- Quickly responses to the errors
- It provides a stable control process
- P controller reduces steady state error when it is applied currently for an know situation.
Disadvantages
- It reduces steady state error but cannot eliminate it entirely.
- It needs manual tuning.
- P controller may lead to oscillations in some system.
Conclusion
Proportional controller or commonly known as P-only controller is straight forward and simplest control strategy to implement. Although it works on closed loop feedback control system. It offers quick and state error signal response with it’s limitations, like problem in tuning, it need to tune manually, which is a bit difficult. It cannot perfectly eliminate steady state error or gain factor, so their is always a small residual error that remains even when the system stabilizes. Despite all this pros and cons, P-only controller is an essential tool in control engineering and provides a basis for further refinement and optimization through more complex control strategies.
FAQs on Proportional controller
1. What is P-only controller ?
P-only controller a short form of proportional controller, is a closed loop feedback controller adjust the output proportionally to error between setpoint and process variable.
2. What is steady state error ?
Steady state error is the difference between the desired value and the actual value of a system output.
3. When a P-only controller should be used ?
P-only controller should be used in system with requirement of simple dynamic and quick response. They are often used as a starting point of control system design, and can be effective in many industrial and engineering applications.
4. What happens if the proportional gain (Kp) is set too low in a P controller?
If Kp is too low, the P controller will respond slowly to errors and may not effectively reduce the error to zero. The system’s response may be sluggish, leading to prolonged settling times.
5. What is proportional band ?
Proportional band(PB) is a range ot error value over which the proportional action takes places to control a system. It is expressed by percentage of the total error.
PB = 100/ Kp
6. What is setpoint ?
In industrial automation and control set point is a desired or targeted value for an process variable.
Share your thoughts in the comments
Please Login to comment...