Machine Learning, as the name suggests, is the science of programming a computer by which they are able to learn from different kinds of data. A more general definition given by Arthur Samuel is – “Machine Learning is the field of study that gives computers the ability to learn without being explicitly programmed.” They are typically used to solve various types of life problems.
In the older days, people used to perform Machine Learning tasks by manually coding all the algorithms and mathematical and statistical formulas. This made the processing time-consuming, tedious, and inefficient. But in the modern days, it is become very much easy and more efficient compared to the olden days with various python libraries, frameworks, and modules. Today, Python is one of the most popular programming languages for this task and it has replaced many languages in the industry, one of the reasons is its vast collection of libraries. Python libraries that are used in Machine Learning are:
- Numpy
- Scipy
- Scikit-learn
- Theano
- TensorFlow
- Keras
- PyTorch
- Pandas
- Matplotlib
Numpy
NumPy is a very popular python library for large multi-dimensional array and matrix processing, with the help of a large collection of high-level mathematical functions. It is very useful for fundamental scientific computations in Machine Learning. It is particularly useful for linear algebra, Fourier transform, and random number capabilities. High-end libraries like TensorFlow uses NumPy internally for manipulation of Tensors.
Python3
import numpy as np
x = np.array([[1, 2], [3, 4]])
y = np.array([[5, 6], [7, 8]])
v = np.array([9, 10])
w = np.array([11, 12])
print(np.dot(v, w), "\n")
print(np.dot(x, v), "\n")
print(np.dot(x, y))
|
Output:
219
[29 67]
[[19 22]
[43 50]]
For more details refer to Numpy.
SciPy

SciPy is a very popular library among Machine Learning enthusiasts as it contains different modules for optimization, linear algebra, integration and statistics. There is a difference between the SciPy library and the SciPy stack. The SciPy is one of the core packages that make up the SciPy stack. SciPy is also very useful for image manipulation.
Python3
from scipy.misc import imread, imsave, imresize
img = imread('D:/Programs / cat.jpg')
print(img.dtype, img.shape)
img_tint = img * [1, 0.45, 0.3]
imsave('D:/Programs / cat_tinted.jpg', img_tint)
img_tint_resize = imresize(img_tint, (300, 300))
imsave('D:/Programs / cat_tinted_resized.jpg', img_tint_resize)
|
If scipy.misc import imread, imsave,imresize does not work on your operating system then try below code instead to proceed with above code
!pip install imageio
import imageio
from imageio import imread, imsave
Original image:

Tinted image:

Resized tinted image:

For more details refer to documentation.
Scikit-learn

Scikit-learn is one of the most popular ML libraries for classical ML algorithms. It is built on top of two basic Python libraries, viz., NumPy and SciPy. Scikit-learn supports most of the supervised and unsupervised learning algorithms. Scikit-learn can also be used for data-mining and data-analysis, which makes it a great tool who is starting out with ML.
Python3
from sklearn import datasets
from sklearn import metrics
from sklearn.tree import DecisionTreeClassifier
dataset = datasets.load_iris()
model = DecisionTreeClassifier()
model.fit(dataset.data, dataset.target)
print(model)
expected = dataset.target
predicted = model.predict(dataset.data)
print(metrics.classification_report(expected, predicted))
print(metrics.confusion_matrix(expected, predicted))
|
Output:
DecisionTreeClassifier(class_weight=None, criterion='gini', max_depth=None,
max_features=None, max_leaf_nodes=None,
min_impurity_decrease=0.0, min_impurity_split=None,
min_samples_leaf=1, min_samples_split=2,
min_weight_fraction_leaf=0.0, presort=False, random_state=None,
splitter='best')
precision recall f1-score support
0 1.00 1.00 1.00 50
1 1.00 1.00 1.00 50
2 1.00 1.00 1.00 50
micro avg 1.00 1.00 1.00 150
macro avg 1.00 1.00 1.00 150
weighted avg 1.00 1.00 1.00 150
[[50 0 0]
[ 0 50 0]
[ 0 0 50]]
For more details refer to documentation.
Theano

We all know that Machine Learning is basically mathematics and statistics. Theano is a popular python library that is used to define, evaluate and optimize mathematical expressions involving multi-dimensional arrays in an efficient manner. It is achieved by optimizing the utilization of CPU and GPU. It is extensively used for unit-testing and self-verification to detect and diagnose different types of errors. Theano is a very powerful library that has been used in large-scale computationally intensive scientific projects for a long time but is simple and approachable enough to be used by individuals for their own projects.
Python3
import theano
import theano.tensor as T
x = T.dmatrix('x')
s = 1 / (1 + T.exp(-x))
logistic = theano.function([x], s)
logistic([[0, 1], [-1, -2]])
|
Output:
array([[0.5, 0.73105858],
[0.26894142, 0.11920292]])
For more details refer to documentation.
TensorFlow

TensorFlow is a very popular open-source library for high performance numerical computation developed by the Google Brain team in Google. As the name suggests, Tensorflow is a framework that involves defining and running computations involving tensors. It can train and run deep neural networks that can be used to develop several AI applications. TensorFlow is widely used in the field of deep learning research and application.
Example
Python3
import tensorflow as tf
x1 = tf.constant([1, 2, 3, 4])
x2 = tf.constant([5, 6, 7, 8])
result = tf.multiply(x1, x2)
sess = tf.Session()
print(sess.run(result))
sess.close()
|
Output:
[ 5 12 21 32]
For more details refer to documentation.
Keras

It provides many inbuilt methods for groping, combining and filtering data.
Keras is a very popular Machine Learning library for Python. It is a high-level neural networks API capable of running on top of TensorFlow, CNTK, or Theano. It can run seamlessly on both CPU and GPU. Keras makes it really for ML beginners to build and design a Neural Network. One of the best thing about Keras is that it allows for easy and fast prototyping.
For more details refer to documentation.
PyTorch

PyTorch is a popular open-source Machine Learning library for Python based on Torch, which is an open-source Machine Learning library that is implemented in C with a wrapper in Lua. It has an extensive choice of tools and libraries that support Computer Vision, Natural Language Processing(NLP), and many more ML programs. It allows developers to perform computations on Tensors with GPU acceleration and also helps in creating computational graphs.
Example
Python3
import torch
dtype = torch.float
device = torch.device("cpu")
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.random(N, D_in, device=device, dtype=dtype)
y = torch.random(N, D_out, device=device, dtype=dtype)
w1 = torch.random(D_in, H, device=device, dtype=dtype)
w2 = torch.random(H, D_out, device=device, dtype=dtype)
learning_rate = 1e-6
for t in range(500):
h = x.mm(w1)
h_relu = h.clamp(min=0)
y_pred = h_relu.mm(w2)
loss = (y_pred - y).pow(2).sum().item()
print(t, loss)
grad_y_pred = 2.0 * (y_pred - y)
grad_w2 = h_relu.t().mm(grad_y_pred)
grad_h_relu = grad_y_pred.mm(w2.t())
grad_h = grad_h_relu.clone()
grad_h[h < 0] = 0
grad_w1 = x.t().mm(grad_h)
w1 -= learning_rate * grad_w1
w2 -= learning_rate * grad_w2
|
Output:
0 47168344.0
1 46385584.0
2 43153576.0
...
...
...
497 3.987660602433607e-05
498 3.945609932998195e-05
499 3.897604619851336e-05
For more details refer to the documentation.
Pandas

Pandas is a popular Python library for data analysis. It is not directly related to Machine Learning. As we know that the dataset must be prepared before training. In this case, Pandas comes handy as it was developed specifically for data extraction and preparation. It provides high-level data structures and wide variety tools for data analysis. It provides many inbuilt methods for grouping, combining and filtering data.
Python3
import pandas as pd
data = {"country": ["Brazil", "Russia", "India", "China", "South Africa"],
"capital": ["Brasilia", "Moscow", "New Delhi", "Beijing", "Pretoria"],
"area": [8.516, 17.10, 3.286, 9.597, 1.221],
"population": [200.4, 143.5, 1252, 1357, 52.98] }
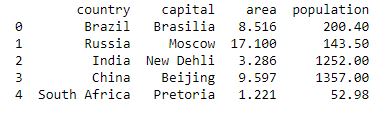
data_table = pd.DataFrame(data)
print(data_table)
|
Output:
For more details refer to Pandas.
Matplotlib

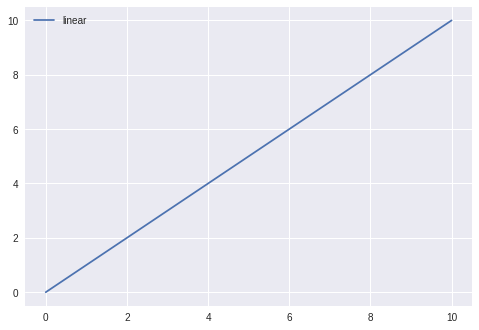
Matplotlib is a very popular Python library for data visualization. Like Pandas, it is not directly related to Machine Learning. It particularly comes in handy when a programmer wants to visualize the patterns in the data. It is a 2D plotting library used for creating 2D graphs and plots. A module named pyplot makes it easy for programmers for plotting as it provides features to control line styles, font properties, formatting axes, etc. It provides various kinds of graphs and plots for data visualization, viz., histogram, error charts, bar chats, etc,
Python3
import matplotlib.pyplot as plt
import numpy as np
x = np.linspace(0, 10, 100)
plt.plot(x, x, label ='linear')
plt.legend()
plt.show()
|
Output:
For more details refer to documentation.
Share your thoughts in the comments
Please Login to comment...