Rolling motion is one of the most relevant movements we can see in our everyday life. There is a rolling motion in all wheels used in transportation like cars, buses, trains, aero planes, bikes, and buffalo carts. We can also see the rolling motion in gears and ball bearings. In this article, we will learn about the basic fundaments of Rolling Motion like definition, examples, and its applications in the real world. So, let’s start learning the fundamental topic of Rolling Motion.
Rolling Motion Definition
Rolling motion is a combination of two types of motion,
- Translational Motion
- Rotational Motion
The translational motion of a body is the movement of the centre of mass.
During a body’s rolling motion, the surfaces which come into contact get to deform slightly, and that deforms is temporary that is when the area of both bodies comes into touch with each other, resulting in temporary deformation of the bodied. This phenomenon has the impact effect called friction which is the component of the contact force parallel to the surface that resists the motion.
Translatory motion
Translatory motion is a sort of motion in which all portions of the body move the same distance in the same amount of time. There are two forms of translation motion: rectilinear and curvilinear.
- A motion is said to be in rectilinear motion when a body in translatory motion moves in a straight line. For example, a car moving on a straight road, a train running on a straight track.
- The curvilinear motion describes the movement of a body in translatory motion moves along a curved path. For example, turning a car.
Rotational motion
The motion of a body in a circular path around a fixed point in space, also, the motion of a body that does not deform or change shape in which all of its particles move in circles around an axis with a common angular velocity is called Rotational Motion. For example the motion of the earth about its own axis, the motion of a wheel of vehicles, gears, motors, etc.
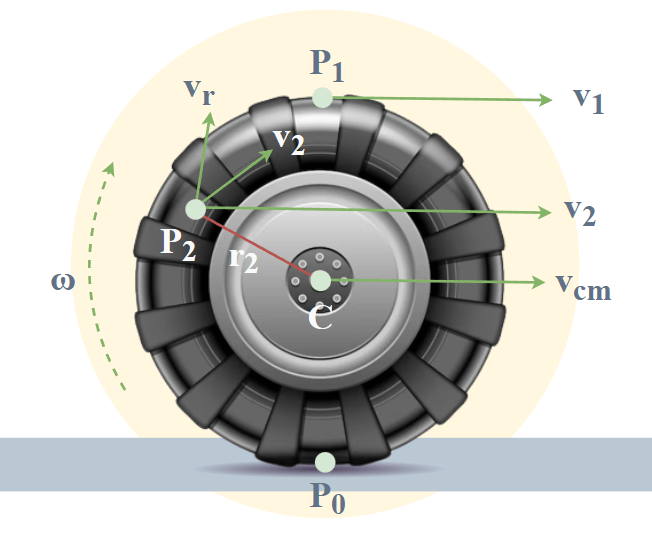
Let the velocity of the wheel’s centre of mass is vcm, which is its translational velocity. Because the rolling wheel’s centre of mass is at its geometric centre C, vcm is the velocity of C. It is parallel to the flat surface. The wheel rotates along its symmetrical axis, which passes through the centre of C. As a result, the velocity of each point on the disc, such as P0 and P1, or P2, is made up of two parts that are the translational velocity vcm and the linear velocity vr due to rotation.
- The magnitude of vr is vr = ωr, where r is the distance between the point and the axis and ω is the angular velocity of the wheel rotation about the axis. With regard to C, the velocity vr is perpendicular to the radius vector of the given point w.r.t C. vr is perpendicular to CP2 in this case.
- It’s simple to demonstrate that v2 is perpendicular to the line P0P2. As a result, the instantaneous axis of rotation is defined as a line passing through P0 and parallel to ω.
- Because of rotation, the linear velocity, vr is exactly opposite the translational velocity, vcm, at point P0. Furthermore, the magnitude of vr, in this case, is Rω, where R is the wheel’s radius.
- The condition that P0 is instantaneously at rest requires vcm = Rω. Thus, for the wheel, the condition for rolling without slipping is vcm = Rω.
- This also means that the velocity of point P1 at the top of the wheel v1 is vcm + R or 2 vcm and is parallel to the level surface.
Kinetic Energy of Rolling Motion
The kinetic energy of a rolling body can be divided into two types i.e.,
- Translational Kinetic Energy
- Rotational Kinetic Energy
The kinetic energy of a system of particles (K) can be divided into the kinetic energy of centre-of-mass motion (translation) (MV2/2) and the kinetic energy of rotational motion about the system’s centre of mass (K′). Therefore the total kinetic energy of the system is,
K = K‘ + (MV2)/2
The kinetic energy of the rolling body’s centre of mass, i.e., the kinetic energy of translation, is m(vcm)2/2, where m is the body’s mass and vcm is the centre of mass velocity.
The motion of the rolling body about its centre of mass K′ is the kinetic energy of rotation of the body
K′ = (Iω2)/2
where I is the moment of inertia about the suitable axis, which is the rolling body’s symmetry axis.
Therefore, the kinetic energy of a rolling body is given by
K = (Iω2)/2 + [m(vcm)]2/2
Substitute I = mk2 where k is the corresponding radius of a rapidly moving body and ω=vcm/R where R is the radius of the circular moving body.

Types of Motion of a Rigid Body on an Inclined Plane
Let’s look at some examples of rigid body motion.
Sliding of Block on Inclined Plane
Let’s start with a rectangular block that slides down an inclined plane without moving sideways. The block is treated as if it were a rigid body. Its travel down the plane is such that all the body’s particles are moving in lockstep, i.e. they have the same velocity at all times. The rigid body is in pure translational motion in this scene.
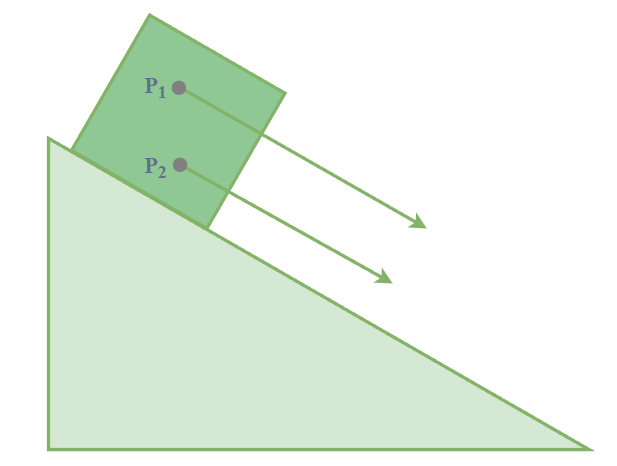
Translational (sliding) motion of a block down an inclined plane. (Any point like P1 or P2 of the block moves with the same velocity at any instant of time.)
Rolling of Cylinder on Inclined Plane
Consider how a solid metallic or wooden cylinder might roll down the same slanted plane. The cylinder, shifts from the top to the bottom of the inclined plane, giving the impression of translational motion. However, as seen in all of its particles are not travelling at the same speed at any given time. As a result, the body is not moving in a true translational motion. It moves in a combination of a translational and something else motion.
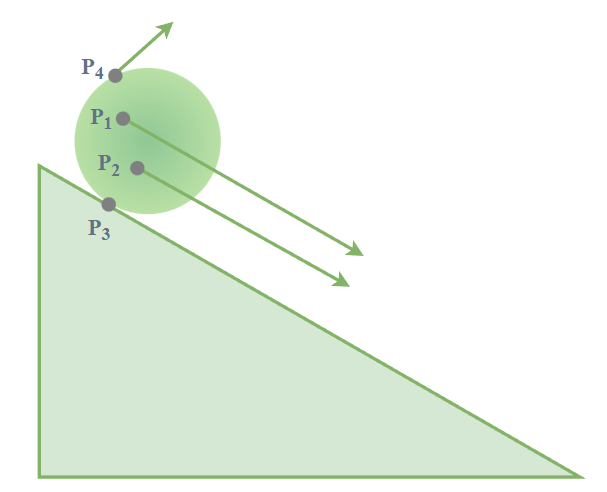
The rolling motion of a cylinder. It is not pure rapture translational motion. Points P1, P2, P3, and P4 have different velocities (shown by arrows)at any instant of time. In fact, the velocity of the point of contact P3 is zero at any instant, if the cylinder rolls without slipping.
Rolling Friction
Rolling friction is the force which opposes the rolling motion of round objects such as a wheel or a ball. Rolling friction is caused by the deformation of the objects in contact, and it can be affected by factors such as the texture of the surface, the weight of the object, and the shape and size of the object.
The formula for rolling friction is given by:
Fr = Crr × N
Where,
- Fr is the rolling friction force,
- Crr is the coefficient of rolling resistance, and
- N is the normal force between the object and the surface.
Note: The coefficient of rolling resistance i.e., Crr, is a dimensionless constant that depends on the materials in contact and the surface roughness.
Applications of Rolling Motion
There are various applications of rolling motion in our daily life, some of these applications are as follows:
- Land vehicles primarily use wheels for displacement, minimizing slip to avoid accidents.
- Rolling-element bearings, such as ball bearings, are used in rotating devices for little friction and smooth operation.
- Motors, like those in ceiling fans, cars, and drills, rely on the stationary inner ring and rotating outer ring of ball bearings and the quality of ball bearings and the amount of lubrication affect friction on the mechanism’s parts.
- Rolling objects are used for transportation, such as placing an object on a series of rollers or wheels and this method of primitive transportation is efficient when no other machinery is available.
- Today, cars, trains, and other human transportation vehicles are the most practical application of objects on wheels.
Read More,
Sample Problems on Rolling Motion
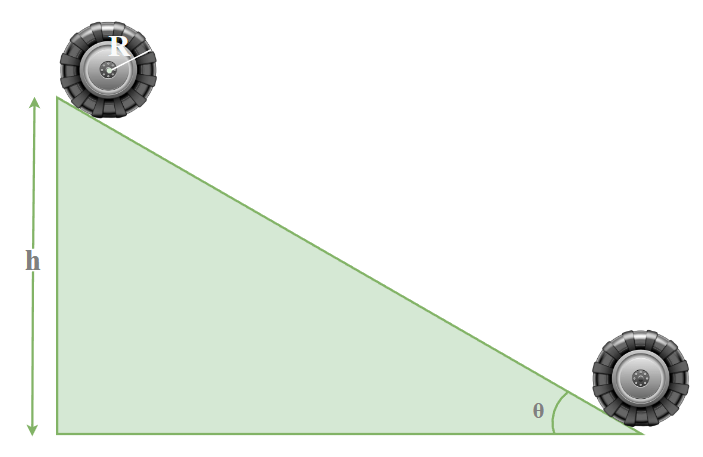
Problem 1: Three bodies, a ring, a solid cylinder, and a solid sphere roll down the same inclined plane without slipping. They start from rest. The radii of the bodies are identical. Which of the bodies reaches the ground with maximum velocity?
Solution:
According to the conservation of energy of the rolling body, i.e. there is no loss of energy due to friction. . The potential energy lost by the body in rolling down the inclined plane is P.E= mgh, therefore, be equal to kinetic energy gained. The bodies start from rest the kinetic energy gained is equal to the final kinetic energy of the bodies.
The expression for the kinetic energy is

where v is the final velocity of the Centre of mass of the body.
Equate K and mgh,

Here, velocity is independent of the mass of the rolling body,
For a ring, k2= R2, therefore the expression can be written as

For a solid cylinder k2= R2/2 , therefore,

Now for a solid sphere k2= 2R2/5 , therefore,

The results show that the sphere has the greatest and the ring has the least velocity of the centre of mass at the bottom of the inclined plane.
Problem 2: Find the moment of inertia of a sphere about a tangent to the sphere, given the moment of inertia of the sphere about any of its diameters to be 2 MR2/5, where M is the mass of the sphere and R is the radius of the sphere.
(b) Given the moment of inertia of a disc of mass M and radius R about any of its diameters to 1 be 1/4 MR2, find the moment of inertia about an axis normal to the disc passing through a point on its edge.
Solution:
(a)
Moment of inertia of sphere about any diameter = 2/5 MR2
Applying theorem of parallel axes
(I)Moment of inertia of sphere about a tangent to the sphere = 2/5 MR2 +M(R)2
I = 7/5 MR2
(b)
Given,
Expression for the moment of inertia of the disc about any of its diameters can be written as
L= 1/4 MR2
(i) Using theorem of perpendicular axes, the moment of inertia of the disc about an axis passing through its centre and normal to the disc can be written as
I= 2 x 1/4 MR2
I = 1/2 MR2
(ii) Using theorem axes, moment of inertia of the disc passing through a point on its edge and normal to the dies can be written as
I = 1/2 MR2+ MR2
I = 3/2 MR2
Problem 3: Equal magnitude of torque is applied to a hollow cylinder and a solid sphere, both having the same mass and radius. The cylinder is free to rotate about its standard axis of symmetry, and the sphere is free to rotate about an axis passing through its centre. Which of the two will acquire a greater angular speed after a given time?
Solution:
Let the radius and mass of the hollow cylinder, and the solid sphere be R and M respectively.
Moments of inertia of the hollow cylinder about the respective axes is I1 = MR2
Moments of inertia of the solid sphere about the respective axes I2 = (2/5) MR2
Let the magnitude of the torque applied to the cylinder and the sphere is τ , which produce angular accelerations α1 and α2 respectively in the cylinder and the sphere
Magnitude of the torque can be expressed as
τ = I1 α1 = I2 α2
MR2 α1 = (2/5) MR2 α2
α2 = 5/2 α1
Thus, the sphere has larger angular acceleration.
Therefore, the sphere will acquire larger angular speed after a given time.
Problem 5: A ring of mass m and radius R has three particles attached to the ring as shown in the figure. The centre of the ring has a speed v0. If the kinetic energy of the system is xmv0 2. Find x (Slipping is absent)
Solution:
The expression for the rolling motion when slip is absent is,

Now the speed of the 2m particle placed at left side is

The speed of the m particle placed at right side is
Speed of the m particle placed at top is

Kinetic energy placed at left , right and top is

Kinetic energy of the ring is
K.E = Rotational Kinetic Energy + Translational Kinetic Energy

Substitute,

Total Kinetic Energy is,

Therefore, the value of x is 6.
Other Physics links:
Rolling Motion – FAQs
What is Rolling Motion?
Rolling motion is the motion of the object in which the object rotates around it’s axis as well as moves forward.
What are Some Examples of Rolling Motion?
Some examples of rolling motion are a wheel rolling down a hill, a ball rolling on a flat surface, a cylinder rolling on a slope etc.
What is the Difference Between Rolling Motion and Sliding Motion?
In rolling motion object rotates about it’s axis and moves ahead whereas in sliding motion object moves ahead without rotation.
What is the Role of Friction in Rolling Motion?
Friction plays an important role in rolling motion. It provides the necessary force to propel the object forward and also enables the object to maintain its rotational motion.
How does the Shape of an Object Affect its Rolling Motion?
The shape of an object affects its rolling motion as the smooth shapes like circle can perform
What is the Difference between Rolling with Slipping and Rolling without Slipping?
Rolling without slipping occurs when the object’s velocity at the point of contact with the ground is zero. Rolling with slipping, on the other hand, occurs when the object’s velocity at the point of contact with the ground is not zero, resulting in slipping and reduced efficiency of motion.
How is Rolling Motion related to Energy Conservation?
In rolling motion, energy is conserved as the object rotates and moves forward. The object’s kinetic energy is distributed between its rotational and translational motion, resulting in efficient motion with minimal loss of energy.
Share your thoughts in the comments
Please Login to comment...