Have you ever wondered why, when we stretch an elastic band and then let it go, it returns to its previous state? It is compelled to revert to its original state by a force. But what exactly is this force? Let us investigate this force and develop the force law for simple harmonic motion.
Periodic Motion is something we’re already familiar with. Periodic motion is defined as motion that repeats itself at equal intervals of time. For example, the motion of a clock’s hands, the motion of a car’s wheels, and the motion of a merry-go-round. In nature, all of these motions are repeated. They repeat themselves after a certain period of time.
An Oscillatory Motion is a periodic movement in which an item oscillates about its equilibrium position. After a given amount of time, the item repeats the same sequence of moves. An Oscillation is one such series of motions. An oscillatory motion may be seen in the movement of a basic pendulum, the movement of leaves in a breeze, and the movement of a cradle.
Simple Harmonic Motion (SHM)
Simple harmonic motion is the most basic type of oscillatory motion. When an object moves in a straight path, it exhibits simple harmonic motion. All oscillatory motion examples are instances of basic harmonic motion.
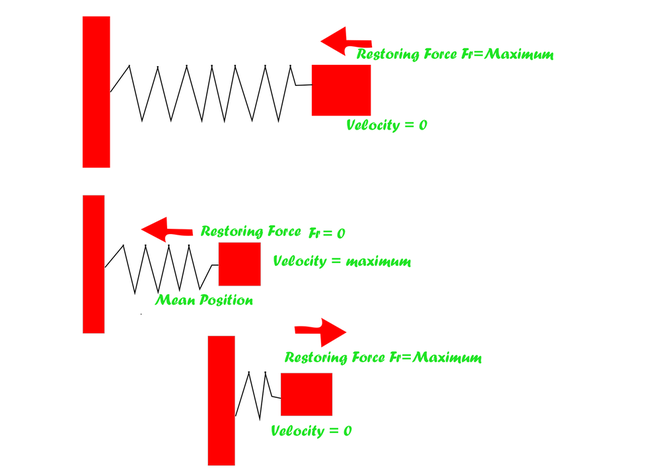
Swinging a basic pendulum causes it to move away from its mean equilibrium point. When it reaches its extreme position, where it has the greatest displacement, it comes to a halt, and its velocity becomes zero. It returns to its equilibrium position as a result of a force acting in the direction of the equilibrium position.
It now travels through its normal location but does not stop. It shifts to its other extreme position. After that, it returns to its original place. An Oscillation is a type of full motion. A basic pendulum’s swing is an excellent illustration of simple harmonic motion.
Thus, the motion of a body is said to be simply harmonic if the restoring force acting on it is directly proportional to the displacement from the mean position and always tends to oppose it. The direction of the restoring force is opposite to the direction of displacement.
The acceleration of a particle moving in a simple harmonic motion is given by,
a(t) = -ω2x(t)
where ω is the angular velocity of the particle.
Let’s now discuss some important terms related to a Simple Harmonic Motion of a particle as
- Displacement (x): Displacement at any instant of time is defined as the net distance travelled by the body executing SHM from its mean or equilibrium position.
- Amplitude (A): The amplitude of oscillation is defined as the maximum displacement of the body executing SHM on either side of the mean position.
- Velocity (v): Velocity at any instant is defined as the rate of change of displacement with time. For a body executing SHM, its velocity is maximum at the mean position and minimum (zero) at the extremes. The Velocity of the body is inversely proportional to the displacement from the mean position.
- Acceleration (a): Acceleration is defined as the rate of change of velocity with time. Unlike velocity, acceleration is directly proportional to displacement. It is maximum at the extreme positions where the displacement is maximum and minimum at the mean position (displacement = 0).
- Restoring Force (FR): Restoring Force is the force that always acts in a direction opposite to that of displacement but is directly proportional to it. Restoring Force is maximum at the extreme positions and minimum at the mean position.
- Spring Constant (k): Spring Constant is a constant value for a particular spring that determines the amount of force required to compress or stretch the spring by 1 unit.
- Energy (E): The total energy of the body under SHM is called mechanical energy, mechanical energy of the body remains constant throughout the motion if the medium is frictionless. The Mechanical Energy of a body at any instant is the sum total of its kinetic and potential energy.
- Time Period (T): The Time Period of oscillation is defined as the time taken by the body to complete one oscillation. In other words, it is the time taken to cover 4 times the amplitude.
- Frequency (f): Frequency is defined as the number of oscillations made by the body in one second. It is reciprocal of the time period. f = (1/T)
Note: In periodic motion, the direction of restoring force may or may not be in the direction of displacement but in Simple Harmonic Motion (SHM) the direction of restoring force is always opposite to the direction of displacement. This leads to the fact that all Simple Harmonic Motions are periodic motions but vice versa is not true.
Force Law For Simple Harmonic Motion
Let us use an example to develop the force law for simple harmonic motion. The most basic example of simple harmonic motion is a spring-block system. Consider a mass m block attached to a spring, which is then attached to a stiff wall. The block is supported by a frictionless surface.
The spring is at its equilibrium position when we do not pull it, that is when no force is exerted to it. The net force acting on it is zero in this condition. Let’s try two different things and see what happens.
- When we move the block outwards, a force acts on it, attempting to draw it inwards, towards its equilibrium position.
- When we press the block inwards, a force operating on it tries to push it outwards, towards its equilibrium position.
In both situations, we can observe that a force is operating on the block to try to return it to its equilibrium position. This force is the restoring force, and it is the foundation of the force law for simple harmonic motion. Let’s figure out how to apply this concept.
Variation in restoring force with change in displacement
Let F be the restoring force and x denote the displacement of the block from its equilibrium position. As a result of our observations, we may conclude that the restoring force is directly proportional to the displacement from the mean position.
This implies,
F = – kx ……(1)
where k is known as the force constant. It is measured in N/m in the SI system and in dynes/cm in the C.G.S. system. The negative symbol denotes that the restoring force and displacement are always pointing in opposing directions. For simple harmonic motion, equation (1) is the simplest version of the force law.
It demonstrates the fundamental law of simple harmonic motion, which states that force and displacement must be in opposing directions.
We also know that:
F = ma
As a result,
a = F/m
Substituting the value of F from equation (1) which yields,
a = – kx/m = – ω2x (where k/m = ω2) ……(2)
As a result, Equations I and II are the force laws of simple harmonic motion. It should be noted that the restoring force is always directed towards the mean position and in the opposite direction of displacement.
Example:
If the force required to stretch a spring by 50 cm is 150 N. How much force is
required to compress it by 35 cm?
Solution:
According to Hooke’s law: FR = -kx
In the first case: x= -50 cm = -0.5 m
[x is taken negative to indicate that it is opposite to FR]
FR = 150 N
k = (- 150/-0.5) N/m
k = 300 N/m
In the second case:
x= 35 cm = 0.35 m
FR= -300 * 0.35 N
= -105 N
Differential Equation
We know Force = mass * acceleration.
Acceleration (a) of a body in SHM is given by:
a = d2x/dt2 [Acceleration is the rate of change of velocity, a = (dv/dt) and v = (dx/dt)]
Force (F) = mass (m) * acceleration (a).
Now according to Hooke’s law,
FR = -kx, F = FR [F is the force applied and FR is the restoring force]
Therefore: -kx = m * a
-kx = m * d2x / dt2
d2x / dt2= (-k * x) / m
Note: Restoring Force is zero at the mean position because at mean position the value of x ix zero.
Work Done in SHM
Work done = Force * Displacement, you might be thinking that as the applied force is equal to the
restoring force which is kx (magnitude) and the displacement is x so the work done should be kx2,
but this is not the case here, we cannot use W = Force * Displacement because this definition or formula
of work done is applicable only when the force is constant but in SHM, force is a function of displacement
from the mean position.
The formula for work done in the case of SHM :
W = (1/2) ∗ k ∗ x2
Proof:
For variable force,
W = ∫ F dx
W = ∫ kx dx [F = kx]
W = (1/2) ∗ k ∗ x2
This is also the formula for the potential energy of the mass-spring system denoted by UX
Relationship between SHM and uniform circular motion.
The motion of the body is said to be circular if its distance from a fixed point (centre) remains constant throughout the motion.
The circular motion is said to be uniform if the speed of the body in motion remains constant.
Note: Speed remains constant but not the velocity because the direction of motion keeps on changing. Uniform circular motion is an
accelerated motion.
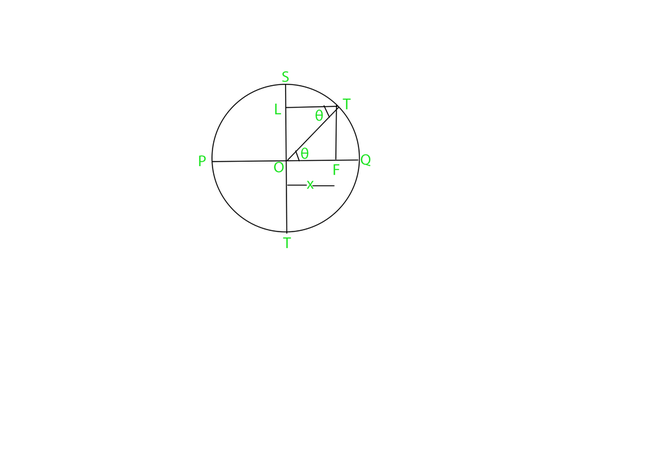
Uniform Circular Motion of a body
Considering the figure given above, the projection of the body under uniform circular motion on the diameter is said to be simple harmonic motion.
If we consider the motion of the body sideways it looks as if the body is moving in a straight-line path along the diameter with the centre
of the circle being the equilibrium position.
Displacement in SHM
In the figure, ‘θ’ is the angular displacement, ‘x’ is the linear displacement of the body under SHM.
cos θ = Base / Hypotenuse,
cos θ = OF / OT
cos θ = x / A, x is the displacement from the mean position and A is the amplitude
x = A cos θ — Equation of displacement of a body under SHM.
x = A cos(ωt), ω is the angular velocity or frequency, θ = ωt.
x = A cos (2πft), ω = 2πft
The maximum value of the cosine of any angle is +1 (positive direction) and -1 (negative direction), considering this the maximum value of x can be A (magnitude),
which is the amplitude of oscillation or vibration.
The equation can also be written in the form of sine of the angular displacement, y = A sin θ.
Velocity in SHM
As discussed, velocity is defined as the rate of change of displacement with time.
v = d(x) / dt
v = d(A cos (ωt)) / dt
v =(-A sin (ωt)) * ω
v = -V sin (ωt) — Equation of velocity, V= Aω.
‘V’ is the velocity with which the body is revolving in the circular path. Linear Velocity = Angular Velocity * Radius of the circle.
‘ω’ is the angular velocity, ‘A’ is the amplitude which in turn is the radius of the circle, hence we can write ‘V’ in place
of ‘Aω’.
In △ TOF, sin (ωt) = (TF) / (TO),
sin (ωt) = √(A2 – x2) / A [By Pythagoras Theorem, Hypotenuse2 = (Perpendicular)2 + (Base)2, TF = √(A2– x2)]
Replacing the value of sin (ωt) in the equation of velocity,
v =( -V * √(A2 – x2 )) / A — Another form of equation of velocity.
In the above equation, if the value of x is equal to A i.e. if the displacement is maximum then the value of v is zero and
if the value of x is zero i.e. if the body is at the mean position then the value of v is max.
‘V’ is the velocity of the body executing uniform circular motion and also the maximum velocity
of the body executing simple harmonic motion.
Acceleration in SHM
Acceleration (a) is defined as the rate of change of velocity with time.
v = -A sin (ωt)) * ω — Equation of velocity
a = d(v) / dt
a = d((-A sin (ωt)) * ω) / dt
a= -A cos (ωt) * ω2 — Equation of acceleration
In △ TOF, cos (ωt) = (OF) / (OT)
cos (ωt) = x / A
Replacing the value of cos (ωt) in the equation of acceleration,
a = (-A * x * ω2 ) / A
a = – xω2 — Another form of the equation of acceleration
Considering the above equation, if the value of x is zero then acceleration is also zero which proves the fact that acceleration is zero at the mean position.
On the other hand, if the value of x is maximum i.e. ‘A’ then the value of acceleration is also maximum.
amax = -Aω2 — Equation for maximum acceleration
Time Period in SHM
Time Period of Oscillation is given by,
T = (2πR) / V, 2πR is the circumference of the circle and V is the linear velocity,
T = (2π) / ω, V = ω * R.
T = (2π) / √(a / x), ω = √(a / x)
T = (2π) * √(x / a)
Hence the time period of oscillation is given by Time Period = (2π) * √(displacement / acceleration).
Frequency in SHM
Frequency is the total number of vibrations or oscillations made by the body in one second.
f = (1/ Time Period)
f = (1/2π) * √(acceleration / displacement)
Kinetic Energy
This energy of the body is due to the motion of the body.
K = (1/2) * m * v2
K = (1/2) * m * (ω * √(A2 – x2 ))2, v = ω * √(A2 – x2)
K = (1/2) * m * ω 2 * (A2 – x2 )
At x = 0, the value of K is maximum.
Kmax = (1/2) * m * ω 2* (A2)
At x= A, the value of K is zero.
Potential Energy
This energy of the body is due to the position of the body or the amount of work done by the body.
U = (1/2) * m * ω2 * x2
Potential Energy is maximum at the extreme positions where the value of displacement is equal to Amplitude and minimum at the equilibrium position
where the displacement is zero.
Umax = (1/2) * m * ω 2 * A2
Simple Pendulum
Another example of a body executing SHM is a simple pendulum, a simple pendulum
consists of a bob being suspended from a thread. If we neglect the mass of thread and friction around
the system then the motion is called SHM.
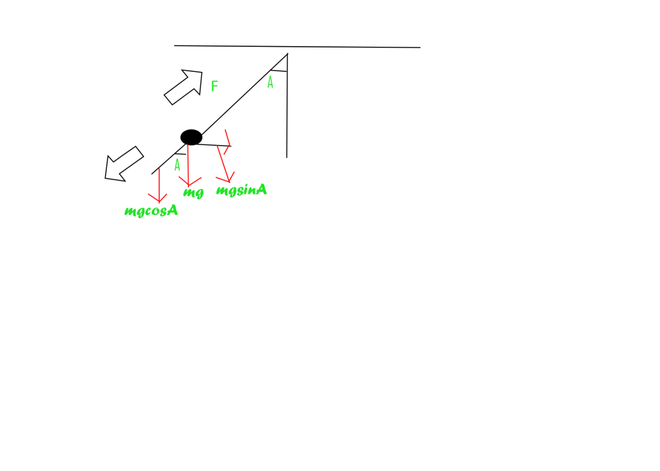
Forces acting on the bob executing SHM
Considering the figure given above:
The effect of mgcosA is cancelled by Force of Tension [F] as both are acting opposite
to each other. This is why the bob is having zero movement in the vertical direction.
The restoring force is being generated due to mgsinA which is in the direction opposite
to that of displacement.
FR = -mgsin(∠A), now if the angular displacement i.e. ∠A is very small then
∠A = sin(∠A) [Unit of angle is radian]
Therefore, FR
= -mg∠A, now ∠A =x/l where x is the linear displacement of the bob
from the mean position and l is the length of the rope or thread used.
Substituting the value of ∠A, we get:
F
R
= -mg(x/l)
The expression states that the restoring force is directly proportional and opposite in direction
to the displacement from the mean position.
Sample Problems
Problem 1: The amount of force required to stretch a spring by 10 cm is 150 N. How much force is required to stretch the spring by 100 cm? Calculate the spring constant of the spring.
Solution:
As long as the external force is applied on the body, the restoring and the applied force are the same, then
F = -kx
Since, it is given that, F = 150 N
x = -10 cm = – 0.1 m (Taking x negative because we have taken force as positive)
Therefore, k = (150 / 0.1) = 1500 N/m
Now, x = -100 cm = -1 m
F = -kx
F = -(1500) × -1
F = 1500 N
Thus, Spring Constant = 1500 N/m
Problem 2: Calculate the amount of work done to compress a spring having a spring constant of 1000 N/m by 30 m.
Solution:
Work done = (1/2) × k × x2
= (1/2) × 1000 × (30)2 Nm or Joule
= 500 × 900 Joule
= 450000 Joule
Problem 3: A body is moving in a circular motion having a Time Period equal to 10 seconds. Considering the motion of the body along the diameter of the circular path. If the force acting on the body at a displacement from the mean position is 200 N then find the acceleration at that point. (Consider the diameter to be made of spring having spring constant = 100 N/m)
Solution:
Given that, T = 10 seconds
According to Hooke’s law, F = -kx
200 = -(100) * x
x = -2 m [Negative sign indicates that the direction of displacement is opposite to that of force]
Acceleration = -ω2x
ω = 2πf,
where f is the frequency of oscillation given by,
f =1/T
f = (1/10) Hz,
And
ω = 2 × 3.14 × 0.1
= 0.628 radian/second
Acceleration = -(0.628)2 × (-2) m/s2
= 0.788768 m/s2
Problem 4: A body having a mass of 10 Kg has a velocity of 3 m/s after 2 seconds of its staring from the maximum displacement position. If the frequency is (1/8) Hz, find the potential energy and kinetic energy of the body at that point and even find the total energy.
Solution:
Since, K = (1/2) × m × v2
= (1/2) × 10 × 9 J
= 45 J
ω = 2πf
= (2 × 3.14) / 8
= 0.785 radians/second
Instantaneous velocity is given by,
v = A × ω × sin (ωt) (Neglecting the negative sign)
3 = A × (0.785) × sin((π/4) × 2)),
0.785 = (π/4) (approx)
or
A = 3 / 0.785 m
A = 3.8217 m
Total Energy(E) = (1/2) * m * ω2 * A2
= (1/2) * 10 * (0.785)2 * (3.8217)2
= 45 J
Potential Energy(U) = Total Energy(E) – Kinetic Energy(K)
= 45 – 45 J
= 0 J
This indicates that the body is at the mean position.
Problem 5: What is the significance of the Spring Constant? Write the dimension of the Spring Constant.
Solution:
Spring constant of a spring is the amount of force required to stretch or compress the given spring by unit displacement. It is used to compare the stiffness of two springs. The one with greater spring constant has more stiffness i.e. is more difficult to deform compared to the one having lower spring constant.
In other words, the amount of work done to stretch or compress a spring (mass-spring system) is directly proportional to its spring constant. Higher the spring constant, higher the amount of work done to stretch or compress it. Unit of Spring Constant is N/m. And the Dimension of Spring Constant is [M L0 T-2].
Problem 6: Derive the expression for the potential energy of the body under SHM.
Solution:
Derivation of Potential Energy
Force = mass * acceleration
F = m * a
F = m * -ω2 * x
We know that Work done = Force * Displacement, but we cannot use this formula directly in SHM because force is not constant.
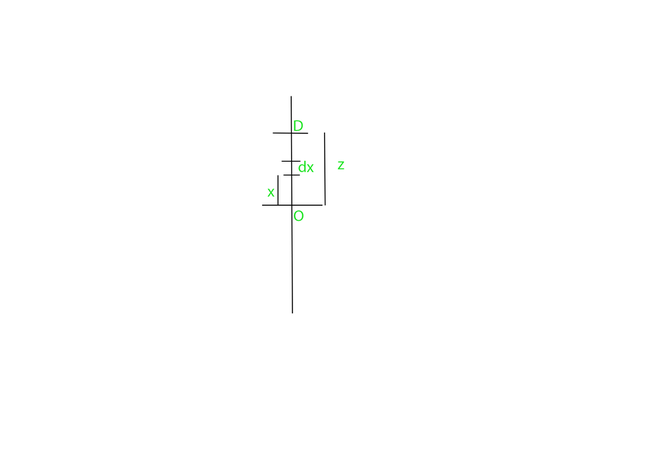
dW = F . dx, where dW is the work done for a very small-displacement dx.
dW = (-m * ω2 * x) * dx * cos(180°) [ Cross product of F and dx, as both are opposite to each other hence the angle between them is 180°]
dW = m * ω2 * x * dx
To calculate the work done in moving the particle from O to D, we integrate the above equation between the limits 0 to z:
∫ dW = ∫ m * ω2 * x dx
W = (1/2) * m * ω2 * z2 [On putting the limits]
This in turn is the potential energy of the body.
Problem 7: The frequency of the body moving in Simple Harmonic Motion is 10 Hz. Calculate the force acting on the body at a displacement of 3 m
from the mean position. Mass of the body is 12 Kg.
Solution:
Given,
f = 10 Hz
ω = 2 * π * f
= 2 * 3.14 * 10 radian/second
= 62.8 radian/second
acceleration(a) = -ω 2* x
= -(62.8)2 * 3
= -11831.52 m/s2
Force = mass * acceleration
= 12 * 11831.52 N
Force = 141978.24 N
Problem 8: Force on a body moving in SHM at a displacement of 3 m from the mean position is 200 N. Mass of the body being 50 kg,
find the frequency of oscillation.
Solution:
Given,
F = 200 N
F = m * a
200 = 50 * a
a = 4 m/s2
We know,
a = -ω2 * x
4 = -ω2 * (-3) [Taken x as negative to state that its direction is opposite to that of acceleration or vice versa]
ω = 2 / √(3)
ω = 1.1547 radian/second (approx)
ω = 2 * π * f
f = (1.1547) / (2 * 3.14)
f = 0.1839 Hz (approx)
Problem 9: A body is undergoing SHM with Time Period equals 20 seconds. The mass of the body is 30 kg. Find the force acting on the body at 4 m from the mean position.
Solution:
Given,
time (t) = 20sec
displacement(x) = 4m
Mass(m) = 30kg
Using the formula for the time period of simple harmonic motion:
T=2π √(x/a)
We can rearrange this equation to solve for the acceleration (𝑎):
a = x / (T/2π)2
Substituting the given values:
a = 4/ (20/2π)2
a = 4 / (10/π)2
a = 4 / (100/π2 )
a = 4π2 /100
a ≈ 0.123 m/s2
Now, let’s calculate the force (𝐹) :
F = m x a = 30 x 0.123 N
F ≈ 3.69 N
So, the correct force acting on the body at a displacement of 4 m from the mean position is approximately 3.69 N
Problem 10: At what positions do the values of potential energy and kinetic energy are maximum in SHM ?
Solution:
Potential Energy is maximum at the extreme positions i.e. when the value of x is equal to A (amplitude) i.e
when the value of displacement is maximum.
Kinetic Energy is maximum at the equilibrium position because kinetic energy depends on the velocity and
since the velocity is maximum at the equilibrium position (x = 0), hence Kinetic Energy is also maximum.
Problem 11: A body executes SHM having a period of 20 seconds. Three seconds after it passes through its centre of oscillation, its velocity
is found to be 2 m/s. Find the amplitude.
Solution:
We know,
v = -A * ω * sin(ωt), v is the velocity, ω is the angular velocity and t is the time.
Given,
T = 20 seconds
ω = 2 * π * f
= 2 * π * (1 / 20) — f = 1 / T.
Note: We cannot take t = 3 because we have derived all the equations of simple harmonic motion
considering the motion to be starting from extreme position hence we need
to subtract the time from the (time period / 4) to get the actual time.
t = (20 / 4) – 3
= 2
Now,
v = -A * ω * sin(ωt)
2 = -A * (2 * π * (1 / 20)) * sin(2 * π * (1 / 20) * 2)
A = -10.84 m
[Neglecting the minus sign]
Amplitude = 10.84 m.
Problem12: Is the uniform circular motion of a body an example of Simple Harmonic Motion?
Solution:
No, the uniform circular motion of a body is not simple harmonic motion, it is not even an oscillatory motion.
It is a periodic motion.
All simple harmonic motions are periodic motions but all periodic motions are not simple harmonic motions.
If we consider the motion of the body along the diameter of the circle then it is a simple harmonic motion.
Problem 13: Does force acting on a body executing simple harmonic motion dependent on the displacement from the mean position?
Solution:
Yes, force is directly proportional to the displacement from the mean position.
It is zero at the equilibrium position (x = 0) and maximum at the extreme positions where the value of displacement is maximum.
According to Hooke’s law,
F = -kx, where k is the spring constant and x is the displacement from the equilibrium position.
Problem 14: The frequency of oscillation of a body is f. What is the frequency with which its kinetic energy oscillates?
Solution :
As the Kinetic Energy becomes zero and maximum twice in course of one full oscillation hence it oscillates at frequency 2 * f.
Question 15: What is the phase difference between the displacement and acceleration of the particle oscillating in SHM?
Solution:
Zero, there is no phase difference between displacement and acceleration.
Share your thoughts in the comments
Please Login to comment...