Deep learning is a powerful and flexible method for developing state-of-the-art ML models. PyTorch is a popular open-source deep learning framework that provides a seamless way to build, train, and evaluate neural networks in Python. In this article, we will go over the steps of training a deep learning model using PyTorch, along with an example.
A neural network is a type of machine learning model that is inspired by the structure and function of the human brain. It consists of layers of interconnected nodes, called neurons, which process and transmit information. Neural networks are particularly well suited for tasks such as image and speech recognition, natural language processing, and making predictions based on large amounts of data.
below is an image of neural network
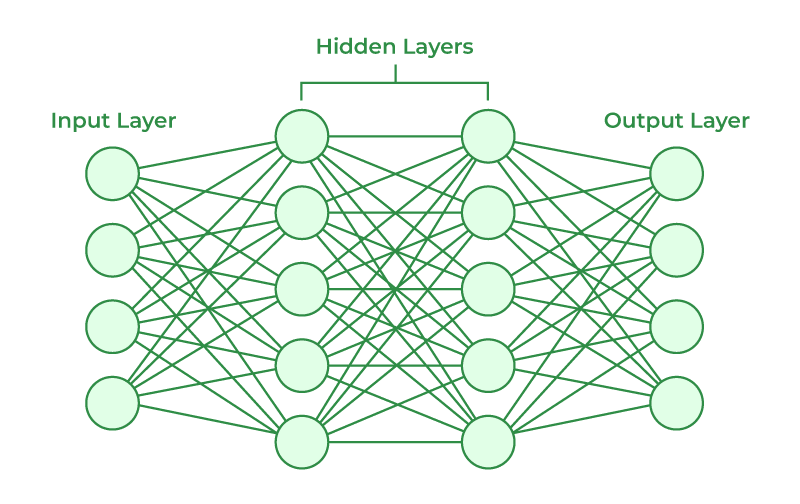
Neural Network
Installing PyTorch
To install PyTorch, you will need to have Python and pip (the package manager for Python) installed on your computer.
You can install PyTorch and necessary libraries by running the following command in your command prompt or terminal:
pip install torch
pip install torchvision
pip install torchsummary
MNIST Datasets
The MNIST dataset is a dataset of handwritten digits, consisting of 60,000 training examples and 10,000 test examples. Each example is a 28×28 grayscale image of a handwritten digit, with values ranging from 0 (white) to 255 (black). The label for each example is the digit that the image represents, with values ranging from 0 to 9.
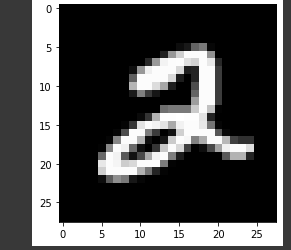
An sample data from Mnist
It is a dataset commonly used for training and evaluating image classification models, particularly in the field of computer vision. It is considered a “Hello World” dataset for deep learning because it is small and relatively simple, yet still requires a non-trivial amount of preprocessing and model architecture design to achieve good performance.
Step 1: Import the necessary Libraries
Python3
import torch
import torchvision
import torch.nn as nn
import torch.optim as optim
from torchsummary import summary
import torch.nn.functional as F
|
Step 2: Load the MNIST Datasets
First, we need to import the necessary libraries and load the dataset. We will be using the built-in MNIST dataset in PyTorch, which can be easily loaded using the torchvision library.
Python3
train_dataset = torchvision.datasets.MNIST(root='./data',
train=True,
transform=torchvision.transforms.ToTensor(),
download=True)
test_dataset = torchvision.datasets.MNIST(root='./data',
train=False,
transform=torchvision.transforms.ToTensor(),
download=True)
|
In the above code the torchvision.datasets.MNIST function is used to load the dataset, it takes several arguments such as:
- root: The directory where the dataset will be saved
- train: A Boolean flag indicating whether to load the training set or the test set.
- transform: A transformation to be applied to the data
- download: A Boolean flag indicating whether to download the dataset if it is not found in the root directory.
Step 3: Build the model
Next, we need to define our model. In this example, we will be using a simple feedforward neural network
Python3
class Classifier(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(1, 32, kernel_size=3, padding=1)
self.conv2 = nn.Conv2d(32, 64, kernel_size=3, padding=1)
self.pool = nn.MaxPool2d(2, 2)
self.dropout1 = nn.Dropout2d(0.25)
self.dropout2 = nn.Dropout2d(0.5)
self.fc1 = nn.Linear(64 * 7 * 7, 128)
self.fc2 = nn.Linear(128, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.dropout1(x)
x = self.pool(F.relu(self.conv2(x)))
x = self.dropout2(x)
x = x.view(-1, 64 * 7 * 7)
x = F.relu(self.fc1(x))
x = self.fc2(x)
return x
|
The Classifier class inherits from PyTorch’s nn.Module class and defines the architecture of the CNN. The __init__ method is called when an instance of the class is created and it sets up the layers of the network.
- self.conv1 = nn.Conv2d(1, 32, kernel_size=3, padding=1): This line creates a 2D convolutional layer with 1 input channel, 32 output channels, a kernel size of 3, and padding of 1. The convolutional layer applies a set of filters (also called kernels) to the input image in order to extract features from it.
- self.conv2 = nn.Conv2d(32, 64, kernel_size=3, padding=1): This line creates another 2D convolutional layer with 32 input channels, 64 output channels, a kernel size of 3, and padding of 1. This layer is connected to the output of the first convolutional layer, allowing the network to learn more complex features from the previous layer’s output.
- self.pool = nn.MaxPool2d(2, 2): This line creates a max pooling layer with a kernel size of 2 and a stride of 2. Max pooling is a down-sampling operation that selects the maximum value from a small neighborhood for each input channel. It helps to reduce the dimensionality of the data, reduce the computational cost and helps to prevent overfitting.
- self.dropout1 = nn.Dropout2d(0.25): This line creates a dropout layer with a probability of 0.25. Dropout is a regularization technique that randomly drops out some neurons during training, which helps to reduce overfitting.
- self.dropout2 = nn.Dropout2d(0.5): This line creates another dropout layer with a probability of 0.5
- self.fc1 = nn.Linear(64 * 7 * 7, 128): This line creates a fully connected (linear) layer with 64 * 7 * 7 input features and 128 output features. Fully connected layers are used to make the final predictions based on the features learned by the previous layers.
- self.fc2 = nn.Linear(128, 10): This line creates another fully connected layer with 128 input features and 10 output features. This layer will produce the final output of the network with 10 classesThe forward method defines the
Next, there is the Forward pass method of the network. It takes an input x and applies a series of operations defined by the layers in the __init__ method.
- x = self.pool(F.relu(self.conv1(x))): This line applies the ReLU activation function (F.relu) to the output of the first convolutional layer (self.conv1), and then applies max pooling (self.pool) to the result.
- x = self.dropout1(x): This line applies dropout to the output of the first pooling layer.
- x = self.pool(F.relu(self.conv2(x))): This line applies the ReLU activation function to the output of the second convolutional layer (self.conv2), and then applies max pooling to the result.
- x = self.dropout2(x): This line applies dropout to the output of the second pooling layer.
- x = x.view(-1, 64 * 7 * 7): This line reshapes the tensor x to a 1D tensor, with -1 indicating that the number of elements in the tensor is inferred from the other dimensions.
- x = F.relu(self.fc1(x)): This line applies the ReLU activation function to the output of the first fully connected layer (self.fc1).
- x = self.fc2(x): This line applies the final fully connected layer (self.fc2) to the output of the previous layer and returns the result, which will be the final output of the network.
- This CNN architecture is a simple one, and it can be used as a starting point for more complex tasks. However, it could be improved by adding more layers, using different types of layers, or tuning the hyperparameters for better performance.
GPU VS CPU
Python3
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
device
|
Output:
device(type='cuda')
This piece of code is used to select the device where we should rain our model. If we are running our code in google colab we can check if the `cuda` device is available if it is available we can use it else we can use normal CPU.
`CUDA` is a GPU optimized for running the ML models
Model Summary
After defining the model we can use the class to create a model object and view the summary of the model. The summary option can be used to print the summary of the model like below.
Python3
model = Classifier()
model.to(device)
summary(model, (1, 28, 28))
|
Output:
----------------------------------------------------------------
Layer (type) Output Shape Param #
================================================================
Conv2d-1 [-1, 32, 28, 28] 320
MaxPool2d-2 [-1, 32, 14, 14] 0
Dropout2d-3 [-1, 32, 14, 14] 0
Conv2d-4 [-1, 64, 14, 14] 18,496
MaxPool2d-5 [-1, 64, 7, 7] 0
Dropout2d-6 [-1, 64, 7, 7] 0
Linear-7 [-1, 128] 401,536
Linear-8 [-1, 10] 1,290
================================================================
Total params: 421,642
Trainable params: 421,642
Non-trainable params: 0
----------------------------------------------------------------
Input size (MB): 0.00
Forward/backward pass size (MB): 0.43
Params size (MB): 1.61
Estimated Total Size (MB): 2.04
----------------------------------------------------------------
Step 4: Define the loss function and optimizer
Now, we need to define a loss function and an optimizer. For this example, we will be using the cross-entropy loss and the ADAM optimizer.
Python3
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)
|
The code defines the loss function and optimizer for the neural network.
nn.CrossEntropyLoss() is a PyTorch function that creates an instance of the cross-entropy loss function. Cross-entropy loss is commonly used in classification problems as it measures the dissimilarity between the predicted class probabilities and the true class. It is calculated by taking the negative logarithm of the predicted class probability for the true class.
optimizer = optim.Adam(model.parameters(), lr=0.001): This line creates an instance of the optim.Adam class, which is an optimization algorithm commonly used for deep learning. The Adam optimizer is an extension of stochastic gradient descent that uses moving averages of the parameters to provide a running estimate of the second raw moments of the gradients; the term Adam is derived from adaptive moment estimation. It requires the model’s parameters to be passed as the first argument and the learning rate is set to 0.001. The learning rate is a hyperparameter that controls the step size at which the optimizer makes updates to the model’s parameters.
The optimizer and the loss function are used during the training process to update the model’s parameters and to evaluate the model’s performance, respectively.
Step 5: Train the model
Now, we can train our model using the training dataset. We will be using a batch size of 100 and will train the model for 10 epochs. The below code is training the neural network on a dataset using a loop that iterates over the number of training epochs and over the data in the training dataset.
- batch_size = 100 and num_epochs = 10 define the batch size and number of epochs for the training process. The batch size is the number of samples from the training dataset that are used in one forward and backward pass of the neural network. The number of epochs is the number of times the entire training dataset is passed through the network.
- torch.utils.data.DataLoader(train_dataset, batch_size=batch_size, shuffle=True) creates a PyTorch DataLoader for the training dataset. The DataLoader takes the training dataset as an input and returns an iterator over the dataset. The iterator will return a set of samples (images and labels) in each iteration, where the number of samples is determined by the batch size. By setting shuffle=True, the DataLoader will randomly shuffle the dataset before each epoch.
- The outer loop, for epoch in range(num_epochs), iterates over the number of training epochs.
- The inner loop, for i, (images, labels) in enumerate(train_loader), iterates over the DataLoader, which returns batches of images and labels. The images are passed through the model using outputs = model(images) to get the model’s predictions.
- The loss is calculated by passing the model’s predictions and the true labels to the loss function using loss = criterion(outputs, labels).
- The optimizer is used to update the model’s parameters in the direction that minimizes the loss. This is done in the following 3 steps:
- optimizer.zero_grad() which clears the gradients of all optimizable parameters.
- loss.backward() computes the gradients of the loss with respect to the model’s parameters.
- optimizer.step() updates the model’s parameters based on the computed gradients.
- After the end of each epoch, the code prints the current epoch and the loss at the end of the epoch.
At the end of the training process, the model’s parameters will have been updated to minimize the loss on the training dataset.
It’s worth noting that it’s also useful to use a validation set to evaluate the model performance during training, so we can detect overfitting and adjust the model accordingly. we can achieve this by splitting the training set into two parts: training and validation. Then, use the training set for training, and use the validation set for evaluating the model performance during training.
Python3
batch_size=100
num_epochs=10
val_percent = 0.2
val_size = int(val_percent * len(train_dataset))
train_size = len(train_dataset) - val_size
train_dataset, val_dataset = torch.utils.data.random_split(train_dataset,
[train_size,
val_size])
train_loader = torch.utils.data.DataLoader(train_dataset,
batch_size=batch_size,
shuffle=True,
pin_memory=True)
val_loader = torch.utils.data.DataLoader(val_dataset,
batch_size=batch_size,
shuffle=False,
pin_memory=True)
losses = []
accuracies = []
val_losses = []
val_accuracies = []
for epoch in range(num_epochs):
for i, (images, labels) in enumerate(train_loader):
images=images.to(device)
labels=labels.to(device)
outputs = model(images)
loss = criterion(outputs, labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
_, predicted = torch.max(outputs.data, 1)
acc = (predicted == labels).sum().item() / labels.size(0)
accuracies.append(acc)
losses.append(loss.item())
val_loss = 0.0
val_acc = 0.0
with torch.no_grad():
for images, labels in val_loader:
labels=labels.to(device)
images=images.to(device)
outputs = model(images)
loss = criterion(outputs, labels)
val_loss += loss.item()
_, predicted = torch.max(outputs.data, 1)
total = labels.size(0)
correct = (predicted == labels).sum().item()
val_acc += correct / total
val_accuracies.append(acc)
val_losses.append(loss.item())
print('Epoch [{}/{}],Loss:{:.4f},Validation Loss:{:.4f},Accuracy:{:.2f},Validation Accuracy:{:.2f}'.format(
epoch+1, num_epochs, loss.item(), val_loss, acc ,val_acc))
|
Output:
Epoch [1/10], Loss:0.2086, Validation Loss:14.6681, Accuracy:0.99, Validation Accuracy:0.94
Epoch [2/10], Loss:0.1703, Validation Loss:11.0446, Accuracy:0.95, Validation Accuracy:0.94
Epoch [3/10], Loss:0.1617, Validation Loss:8.9060, Accuracy:0.98, Validation Accuracy:0.97
Epoch [4/10], Loss:0.1670, Validation Loss:7.7104, Accuracy:0.98, Validation Accuracy:0.97
Epoch [5/10], Loss:0.0723, Validation Loss:7.1193, Accuracy:1.00, Validation Accuracy:0.96
Epoch [6/10], Loss:0.0970, Validation Loss:7.5116, Accuracy:1.00, Validation Accuracy:0.98
Epoch [7/10], Loss:0.1623, Validation Loss:6.8909, Accuracy:0.99, Validation Accuracy:0.96
Epoch [8/10], Loss:0.1251, Validation Loss:7.2684, Accuracy:1.00, Validation Accuracy:0.97
Epoch [9/10], Loss:0.0874, Validation Loss:6.9928, Accuracy:1.00, Validation Accuracy:0.98
Epoch [10/10], Loss:0.0405, Validation Loss:6.0112, Accuracy:0.99, Validation Accuracy:0.99
In this example, we have covered the basic steps to train a deep-learning model using PyTorch on the MNIST dataset. This model can be further improved by using more complex architectures, data augmentation, and other techniques. PyTorch is a powerful and flexible library that allows you to build and train a wide range of models, and this example is just the beginning of what you can do with it.
Step 6: Plot Training and Validation curve to check overfitting or underfitting
Once the model is trained, We can plot the Training and Validation Loss and accuracy curve. This can give us an idea of how the model is performing on unseen data, and if it’s overfitting or underfitting.
Python3
import matplotlib.pyplot as plt
plt.plot(range(num_epochs),
losses, color='red',
label='Training Loss',
marker='o')
plt.plot(range(num_epochs),
val_losses,
color='blue',
linestyle='--',
label='Validation Loss',
marker='x')
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.title('Training and Validation Loss')
plt.legend()
plt.show()
plt.plot(range(num_epochs),
accuracies,
label='Training Accuracy',
color='red',
marker='o')
plt.plot(range(num_epochs),
val_accuracies,
label='Validation Accuracy',
color='blue',
linestyle=':',
marker='x')
plt.xlabel('Epoch')
plt.ylabel('Accuracy')
plt.title('Training and Validation Accuracy')
plt.legend()
plt.show()
|
Output:
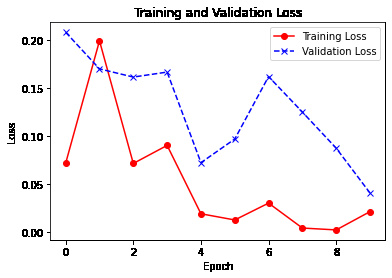
Training and Validation Loss
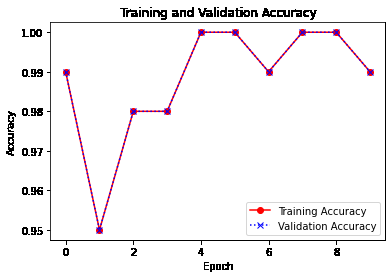
Training and Validation Accuracy
Note that the loss is generally decreasing with each epoch and accuracy is increasing. This is the expected scenario
Step 7: Evaluation
Another important aspect is the choice of the evaluation metric. In this example, we used accuracy as the evaluation metric, which is a good starting point for many problems. However, it’s important to be aware that accuracy can be misleading in some cases, especially when the classes are imbalanced. In those cases, other metrics such as precision, recall, F1-score, or AUC-ROC should be used.
After training the model, you can evaluate its performance on the test dataset by making predictions and comparing them to the true labels. One way to evaluate the performance of a classification model is to use a classification report, which is a summary of the model’s performance across all classes.
The first thing is to evaluate the model on the test dataset and calculate its overall accuracy by comparing the predicted labels to the true labels using the torch.max() function.
Then, it generates a classification report using the classification_report function from the scikit-learn library. The classification report gives you a summary of the model’s performance across all classes by calculating several metrics such as precision, recall, f1-score, and support.
Precision – Precision is the number of true positives divided by the number of true positives plus the number of false positives. It is a measure of how many of the positive predictions were correct.
Recall – Recall is the number of true positives divided by the number of true positives plus the number of false negatives. It is a measure of how many of the actual positive cases were correctly predicted.
F1-score – The F1-score is the harmonic mean of precision and recall. It is a single number that represents the balance between precision and recall.
Support – Support is the number of instances in the test set that belong to a specific class.
It is important to note that the classification report is calculated based on the predictions made on the entire test set, and not just a sample of the test set.
Here is an example of how to evaluate the model and generate a classification report:
Python3
test_loader = torch.utils.data.DataLoader(test_dataset,
batch_size=batch_size,
shuffle=False)
model.eval()
with torch.no_grad():
correct = 0
total = 0
y_true = []
y_pred = []
for images, labels in test_loader:
images = images.to(device)
labels = labels.to(device)
outputs = model(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
predicted=predicted.to('cpu')
labels=labels.to('cpu')
y_true.extend(labels)
y_pred.extend(predicted)
print('Test Accuracy: {}%'.format(100 * correct / total))
from sklearn.metrics import classification_report
print(classification_report(y_true, y_pred))
|
Output:
Test Accuracy: 99.1%
precision recall f1-score support
0 0.99 1.00 0.99 980
1 1.00 1.00 1.00 1135
2 0.99 0.99 0.99 1032
3 0.99 0.99 0.99 1010
4 0.99 0.99 0.99 982
5 0.99 0.99 0.99 892
6 1.00 0.99 0.99 958
7 0.98 0.99 0.99 1028
8 1.00 0.99 0.99 974
9 0.99 0.99 0.99 1009
accuracy 0.99 10000
macro avg 0.99 0.99 0.99 10000
weighted avg 0.99 0.99 0.99 10000
Finally, it’s important to keep in mind that deep learning models require a lot of data and computational resources to train. Training a model on a large dataset might take a long time and require a powerful GPU. There are also several cloud providers such as AWS, GCP, and Azure that provide GPU instances that can be used to train deep learning models, which can be a good option if you don’t have the resources to train the model locally.
Summary
In summary, deep learning with PyTorch is a powerful tool that can be used to build and train a wide range of models. The MNIST dataset is a good starting point to learn the basics, but it’s important to keep in mind that there are many other aspects to consider when working with real-world datasets and problems. With the right knowledge and resources, deep learning can be a powerful tool to solve complex problems and make predictions with high accuracy.
Share your thoughts in the comments
Please Login to comment...