Travelling Salesman Problem (TSP) using Reduced Matrix Method
Last Updated :
21 Apr, 2024
Given a set of cities and the distance between every pair of cities, the problem is to find the shortest possible route that visits every city exactly once and returns to the starting point.
Examples:
Input:
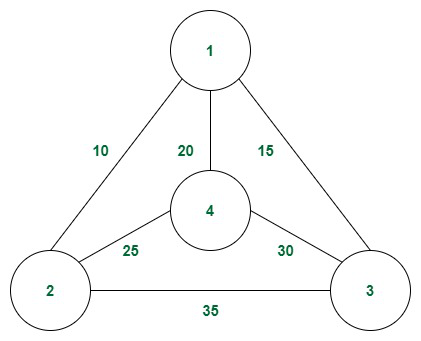
Example of connections of cities
Output: 80
Explanation: An optimal path is 1 – 2 – 4 – 3 – 1.
Dynamic Programming Approach: This approach is already discussed in Set-1 of this article.
Branch and Bound Approach: The branch and bound approach is already discussed in this article.
Reduced Matrix: This approach is similar to the Branch and Bound approach. The difference here is that the cost of the path and the bound is decided based on the method of matrix reduction. The following are the assumptions for a reduced matrix:
- A row or column of the cost adjacency matrix is said to be reduced if and only if it contains at least one zero element and all remaining entries in that row or column ≥ 0.
- If all rows and columns are reduced then only the matrix is reduced matrix.
- Tour length (new) = Tour length (old) – Total value reduced.
- We first rewrite the original cost adjacency matrix by replacing all diagonal elements from 0 to Infinity
The basic idea behind solving the problem is:
- The cost to reduce the matrix initially is the minimum possible cost for the travelling salesman problem.
- Now in each step, we need to decide the minimum possible cost if that path is taken i.e., a path from vertex u to v is followed.
- We can do that by replacing uth row and vth column cost by infinity and then further reducing the matrix and adding the extra cost for reduction and cost of edge (u, v) with the already calculated minimum path cost.
- Once at least one path cost is found, that is then used as upper bound of cost to apply the branch and bound method on the other paths and the upper bound is updated accordingly when a path with lower cost is found.
Following are the steps to implement the above procedure:
- Step1: Create a class (Node) that can store the reduced matrix, cost, current city number, level (number of cities visited so far), and path visited till now.
- Step2: Create a priority queue to store the live nodes with the minimum cost at the top.
- Step3: Initialize the start index with level = 0 and reduce the matrix. Calculate the cost of the given matrix by reducing the row and then the column. The cost is calculated in the following way:
- Row reduction – Find the min value for each row and store it. After finding the min element from each row, subtract it from all the elements in that specific row.
- Column reduction – Find the min value for each column and store it. After finding the min element from each column, subtract it from all the elements in that specific column. Now the matrix is reduced.
- Now add all the minimum elements in the row and column found earlier to get the cost.
- Step4: Push the element with all information required by Node into the Priority Queue.
- Step5: Now, perform the following operations till the priority queue gets empty.
- Pop the element with the min value from the priority queue.
- For each pop operation check whether the level of the current node is equal to the number of nodes/cities or not.
- If yes then print the path and return the minimum cost.
- If No then, for each and every child node of the current node calculate the cost by using the formula-
Child->Cost = parent_matrix_cost + cost_from_parentTochild + Child_reducedMatrix_cost. - The cost of a reduced Matrix can be calculated by converting all the values of its rows and column to infinity and also making the index Matrix[Col][row] = infinity.
- Then again push the current node into the priority queue.
- Step6: Repeat Step5 till we don’t reach the level = Number of nodes – 1.
Follow the illustration below for a better understanding.
Illustration:
Consider the connections as shown in the graph:
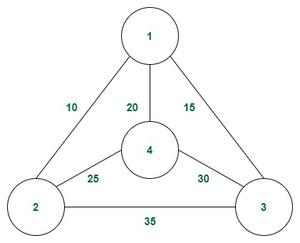
Example of connections
Initially the cost matrix looks like:
row/col
no | 1 | 2 | 3 | 4 |
| 1 | – | 10 | 15 | 20 |
| 2 | 10 | – | 35 | 25 |
| 3 | 15 | 35 | – | 30 |
| 4 | 20 | 25 | 30 | – |
After row and column reduction the matrix will be:
row/col
no | 1 | 2 | 3 | 4 |
| 1 | – | 0 | 5 | 10 |
| 2 | 0 | – | 25 | 15 |
| 3 | 0 | 20 | – | 15 |
| 4 | 0 | 5 | 10 | – |
and row minimums are 10, 10, 15 and 20.
row/col
no | 1 | 2 | 3 | 4 |
| 1 | – | 0 | 0 | 0 |
| 2 | 0 | – | 20 | 5 |
| 3 | 0 | 20 | – | 5 |
| 4 | 0 | 5 | 5 | – |
and the column minimums are 0, 0, 5 and 10.
So the cost reduction of the matrix is (10 + 10 + 15 + 20 + 5 + 10) = 70
Now let us consider movement from 1 to 2: Initially after substituting the 1st row and 2nd column to infinity, the matrix will be:
row/col
no | 1 | 2 | 3 | 4 |
| 1 | – | – | – | – |
| 2 | – | – | 20 | 5 |
| 3 | 0 | – | – | 5 |
| 4 | 0 | – | 5 | – |
- After the matrix is reduced the row minimums will be 5, 0, 0
row/col
no | 1 | 2 | 3 | 4 |
| 1 | – | – | – | – |
| 2 | – | – | 15 | 0 |
| 3 | 0 | – | – | 5 |
| 4 | 0 | – | 5 | – |
- and the column minimum will be 0, 5, 0
row/col
no | 1 | 2 | 3 | 4 |
| 1 | – | – | – | – |
| 2 | – | – | 10 | 0 |
| 3 | 0 | – | – | 5 |
| 4 | 0 | – | 0 | – |
- So the cost will be 70 + cost (1, 2) + 5 + 5 = 70 + 0 + 5 + 5 = 80.
Continue this process till the traversal is complete and find the minimum cost.
Given below the structure of the recursion tree along with the bounds:
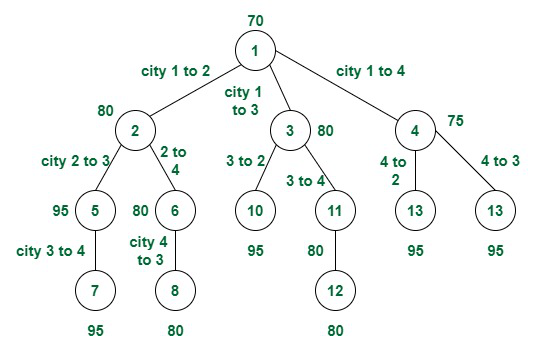
The recursion diagram with bounds
Below is the implementation of the above approach.
C++
// C++ code to implement the approach
#include <bits/stdc++.h>
using namespace std;
// N is the number of cities/Node given
#define N 4
#define INF INT_MAX
// Structure to store all the necessary information
// to form state space tree
struct Node {
// Helps in tracing the path when the answer is found
// stores the edges of the path
// completed till current visited node
vector<pair<int, int> > path;
// Stores the reduced matrix
int reducedMatrix[N][N];
// Stores the lower bound
int cost;
// Stores the current city number
int vertex;
// Stores the total number of cities visited
int level;
};
// Formation of edges and assigning
// all the necessary information for new node
Node* newNode(int parentMatrix[N][N],
vector<pair<int, int> > const& path,
int level, int i, int j)
{
Node* node = new Node;
// Stores parent edges of the state-space tree
node->path = path;
// Skip for the root node
if (level != 0) {
// Add a current edge to the path
node->path.push_back(make_pair(i, j));
}
// Copy data from the parent node to the current node
memcpy(node->reducedMatrix, parentMatrix,
sizeof node->reducedMatrix);
// Change all entries of row i and column j to INF
// skip for the root node
for (int k = 0; level != 0 && k < N; k++) {
// Set outgoing edges for the city i to INF
node->reducedMatrix[i][k] = INF;
// Set incoming edges to city j to INF
node->reducedMatrix[k][j] = INF;
}
// Set (j, 0) to INF
// here start node is 0
node->reducedMatrix[j][0] = INF;
// Set number of cities visited so far
node->level = level;
// Assign current city number
node->vertex = j;
// Return node
return node;
}
// Function to reduce each row so that
// there must be at least one zero in each row
int rowReduction(int reducedMatrix[N][N],
int row[N])
{
// Initialize row array to INF
fill_n(row, N, INF);
// row[i] contains minimum in row i
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
if (reducedMatrix[i][j] < row[i]) {
row[i] = reducedMatrix[i][j];
}
}
}
// Reduce the minimum value from each element
// in each row
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
if (reducedMatrix[i][j] != INF
&& row[i] != INF) {
reducedMatrix[i][j] -= row[i];
}
}
}
return 0;
}
// Function to reduce each column so that
// there must be at least one zero in each column
int columnReduction(int reducedMatrix[N][N],
int col[N])
{
// Initialize all elements of array col with INF
fill_n(col, N, INF);
// col[j] contains minimum in col j
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
if (reducedMatrix[i][j] < col[j]) {
col[j] = reducedMatrix[i][j];
}
}
}
// Reduce the minimum value from each element
// in each column
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
if (reducedMatrix[i][j] != INF
&& col[j] != INF) {
reducedMatrix[i][j] -= col[j];
}
}
}
return 0;
}
// Function to get the lower bound on the path
// starting at the current minimum node
int calculateCost(int reducedMatrix[N][N])
{
// Initialize cost to 0
int cost = 0;
// Row Reduction
int row[N];
rowReduction(reducedMatrix, row);
// Column Reduction
int col[N];
columnReduction(reducedMatrix, col);
// The total expected cost is
// the sum of all reductions
for (int i = 0; i < N; i++) {
cost += (row[i] != INT_MAX) ? row[i] : 0,
cost += (col[i] != INT_MAX) ? col[i] : 0;
}
return cost;
}
// Function to print list of cities
// visited following least cost
void TSPPAthPrint(vector<pair<int, int> > const& list)
{
for (int i = 0; i < list.size(); i++) {
cout << list[i].first + 1 << " -> "
<< list[i].second + 1 << "\n";
}
}
// Comparison object to be used to order the heap
struct Min_Heap {
bool operator()(const Node* lhs, const Node* rhs) const
{
return lhs->cost > rhs->cost;
}
};
// Function to solve the traveling salesman problem
// using Branch and Bound
int solve(int CostGraphMatrix[N][N])
{
// Create a priority queue to store live nodes
// of the search tree
priority_queue<Node*, vector<Node*>, Min_Heap> pq;
vector<pair<int, int> > v;
// Create a root node and calculate its cost.
// The TSP starts from the first city, i.e., node 0
Node* root = newNode(CostGraphMatrix, v, 0, -1, 0);
// Get the lower bound of the path
// starting at node 0
root->cost = calculateCost(root->reducedMatrix);
// Add root to the list of live nodes
pq.push(root);
// Finds a live node with the least cost,
// adds its children to the list of live nodes,
// and finally deletes it from the list
while (!pq.empty()) {
// Find a live node with
// the least estimated cost
Node* min = pq.top();
// The found node is deleted from
// the list of live nodes
pq.pop();
// i stores the current city number
int i = min->vertex;
// If all cities are visited
if (min->level == N - 1) {
// Return to starting city
min->path.push_back(make_pair(i, 0));
// Print list of cities visited
TSPPAthPrint(min->path);
// Return optimal cost
return min->cost;
}
// Do for each child of min
// (i, j) forms an edge in a space tree
for (int j = 0; j < N; j++) {
if (min->reducedMatrix[i][j] != INF) {
// Create a child node and
// calculate its cost
Node* child
= newNode(min->reducedMatrix, min->path,
min->level + 1, i, j);
child->cost
= min->cost + min->reducedMatrix[i][j]
+ calculateCost(child->reducedMatrix);
// Add a child to the list of live nodes
pq.push(child);
}
}
// Free node as we have already stored edges (i, j)
// in vector. So no need for a parent node while
// printing the solution.
delete min;
}
return 0;
}
// Driver code
int main()
{
int CostGraphMatrix[N][N] = { { INF, 10, 15, 20 },
{ 10, INF, 35, 25 },
{ 15, 35, INF, 30 },
{ 20, 25, 30, INF } };
// Function call
cout << "Total cost is " << solve(CostGraphMatrix);
return 0;
}
import java.util.*;
public class Main {
// Define the number of vertices and infinity value
static final int N = 4;
static final int INF = Integer.MAX_VALUE;
// Node class to store each node along with the cost, level, and vertex
static class Node {
ArrayList<int[]> path = new ArrayList<>();
int[][] reducedMatrix = new int[N][N];
int cost;
int vertex;
int level;
}
public static void main(String[] args) {
// Define the cost matrix
int[][] CostGraphMatrix = {
{ INF, 10, 15, 20 },
{ 10, INF, 35, 25 },
{ 15, 35, INF, 30 },
{ 20, 25, 30, INF }
};
// Print the total cost of the tour
System.out.println("Total cost is " + solve(CostGraphMatrix));
}
// Function to allocate a new node
static Node newNode(int[][] parentMatrix, ArrayList<int[]> path, int level, int i, int j) {
Node node = new Node();
node.path = (ArrayList<int[]>)path.clone();
// Add this edge to the path
if (level != 0) {
node.path.add(new int[]{i, j});
}
// Copy data from parent matrix to current matrix
for (int r = 0; r < N; r++) {
node.reducedMatrix[r] = parentMatrix[r].clone();
}
// Change all entries of row i and column j to infinity
// Also change the entry for vertex k to infinity
if (level != 0) {
for (int k = 0; k < N; k++) {
node.reducedMatrix[i][k] = INF;
node.reducedMatrix[k][j] = INF;
}
node.reducedMatrix[j][0] = INF;
}
// Update the level of node
node.level = level;
// Update the vertex number
node.vertex = j;
return node;
}
// Function to perform row reduction
static int rowReduction(int[][] reducedMatrix, int[] row) {
// Initialize row array to INF
Arrays.fill(row, INF);
// Row[i] contains minimum in row i
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
if (reducedMatrix[i][j] < row[i]) {
row[i] = reducedMatrix[i][j];
}
}
}
// Reduce the minimum value from each element in each row
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
if (reducedMatrix[i][j] != INF && row[i] != INF) {
reducedMatrix[i][j] -= row[i];
}
}
}
return 0;
}
// Function to perform column reduction
static int columnReduction(int[][] reducedMatrix, int[] col) {
// Initialize col array to INF
Arrays.fill(col, INF);
// Col[j] contains minimum in col j
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
if (reducedMatrix[i][j] < col[j]) {
col[j] = reducedMatrix[i][j];
}
}
}
// Reduce the minimum value from each element in each column
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
if (reducedMatrix[i][j] != INF && col[j] != INF) {
reducedMatrix[i][j] -= col[j];
}
}
}
return 0;
}
// Function to calculate the cost of the path
static int calculateCost(int[][] reducedMatrix) {
int cost = 0;
int[] row = new int[N];
rowReduction(reducedMatrix, row);
int[] col = new int[N];
columnReduction(reducedMatrix, col);
// Calculate the cost by adding the reduction values
for (int i = 0; i < N; i++) {
cost += (row[i] != INF) ? row[i] : 0;
cost += (col[i] != INF) ? col[i] : 0;
}
return cost;
}
// Function to print the path
static void printPath(ArrayList<int[]> list) {
for (int[] path : list) {
System.out.println((path[0] + 1) + " -> " + (path[1] + 1));
}
}
// Function to solve the TSP problem
static int solve(int[][] CostGraphMatrix) {
// Create a priority queue to store live nodes of the search tree
PriorityQueue<Node> pq = new PriorityQueue<>(Comparator.comparingInt(node -> node.cost));
ArrayList<int[]> v = new ArrayList<>();
// Create a root node and calculate its cost
Node root = newNode(CostGraphMatrix, v, 0, -1, 0);
root.cost = calculateCost(root.reducedMatrix);
// Add root to the list of live nodes
pq.add(root);
// Continue until the priority queue becomes empty
while (!pq.isEmpty()) {
// Find a live node with the least estimated cost
Node min = pq.poll();
// Get the vertex number
int i = min.vertex;
// If all the cities have been visited
if (min.level == N - 1) {
min.path.add(new int[]{i, 0});
printPath(min.path);
return min.cost;
}
// Generate all the children of min
for (int j = 0; j < N; j++) {
if (min.reducedMatrix[i][j] != INF) {
Node child = newNode(min.reducedMatrix, min.path, min.level + 1, i, j);
child.cost = min.cost + min.reducedMatrix[i][j] + calculateCost(child.reducedMatrix);
pq.add(child);
}
}
}
return 0;
}
}
import sys
from queue import PriorityQueue
# Define the number of vertices and infinity value
N = 4
INF = sys.maxsize
# Node class to store each node along with the cost, level, and vertex
class Node:
def __init__(self, parentMatrix, path, level, i, j):
self.path = path.copy()
self.reducedMatrix = [row.copy() for row in parentMatrix]
self.cost = 0
self.vertex = j
self.level = level
# Add this edge to the path
if level != 0:
self.path.append((i, j))
# Change all entries of row i and column j to infinity
# Also change the entry for vertex k to infinity
if level != 0:
for k in range(N):
self.reducedMatrix[i][k] = INF
self.reducedMatrix[k][j] = INF
self.reducedMatrix[j][0] = INF
def __lt__(self, other):
return self.cost < other.cost
# Function to perform row reduction
def rowReduction(reducedMatrix):
row = [INF]*N
# Row[i] contains minimum in row i
for i in range(N):
for j in range(N):
if reducedMatrix[i][j] < row[i]:
row[i] = reducedMatrix[i][j]
# Reduce the minimum value from each element in each row
for i in range(N):
for j in range(N):
if reducedMatrix[i][j] != INF and row[i] != INF:
reducedMatrix[i][j] -= row[i]
return row
# Function to perform column reduction
def columnReduction(reducedMatrix):
col = [INF]*N
# Col[j] contains minimum in col j
for i in range(N):
for j in range(N):
if reducedMatrix[i][j] < col[j]:
col[j] = reducedMatrix[i][j]
# Reduce the minimum value from each element in each column
for i in range(N):
for j in range(N):
if reducedMatrix[i][j] != INF and col[j] != INF:
reducedMatrix[i][j] -= col[j]
return col
# Function to calculate the cost of the path
def calculateCost(reducedMatrix):
cost = 0
row = rowReduction(reducedMatrix)
col = columnReduction(reducedMatrix)
# Calculate the cost by adding the reduction values
for i in range(N):
cost += (row[i] if row[i] != INF else 0)
cost += (col[i] if col[i] != INF else 0)
return cost
# Function to print the path
def printPath(path):
for pair in path:
print(f"{pair[0] + 1} -> {pair[1] + 1}")
# Function to solve the TSP problem
def solve(CostGraphMatrix):
# Create a priority queue to store live nodes of the search tree
pq = PriorityQueue()
# Create a root node and calculate its cost
root = Node(CostGraphMatrix, [], 0, -1, 0)
root.cost = calculateCost(root.reducedMatrix)
# Add root to the list of live nodes
pq.put((root.cost, root))
# Continue until the priority queue becomes empty
while not pq.empty():
# Find a live node with the least estimated cost
min = pq.get()[1]
# Get the vertex number
i = min.vertex
# If all the cities have been visited
if min.level == N - 1:
min.path.append((i, 0))
printPath(min.path)
return min.cost
# Generate all the children of min
for j in range(N):
if min.reducedMatrix[i][j] != INF:
child = Node(min.reducedMatrix, min.path, min.level + 1, i, j)
child.cost = min.cost + min.reducedMatrix[i][j] + calculateCost(child.reducedMatrix)
pq.put((child.cost, child))
return 0
# Define the cost matrix
CostGraphMatrix = [
[ INF, 10, 15, 20 ],
[ 10, INF, 35, 25 ],
[ 15, 35, INF, 30 ],
[ 20, 25, 30, INF ]
]
# Print the total cost of the tour
print("Total cost is", solve(CostGraphMatrix))
class Node {
constructor() {
this.path = [];
this.reducedMatrix = Array.from({ length: N }, () => Array(N).fill(0));
this.cost = 0;
this.vertex = 0;
this.level = 0;
}
}
const INF = Number.MAX_SAFE_INTEGER;
const N = 4;
function newNode(parentMatrix, path, level, i, j) {
const node = new Node();
node.path = [...path];
if (level !== 0) {
node.path.push([i, j]);
}
for (let r = 0; r < N; r++) {
node.reducedMatrix[r] = parentMatrix[r].slice();
}
if (level !== 0) {
for (let k = 0; k < N; k++) {
node.reducedMatrix[i][k] = INF;
node.reducedMatrix[k][j] = INF;
}
node.reducedMatrix[j][0] = INF;
}
node.level = level;
node.vertex = j;
return node;
}
function rowReduction(reducedMatrix, row) {
row.fill(INF);
for (let i = 0; i < N; i++) {
for (let j = 0; j < N; j++) {
if (reducedMatrix[i][j] < row[i]) {
row[i] = reducedMatrix[i][j];
}
}
}
for (let i = 0; i < N; i++) {
for (let j = 0; j < N; j++) {
if (reducedMatrix[i][j] !== INF && row[i] !== INF) {
reducedMatrix[i][j] -= row[i];
}
}
}
return 0;
}
function columnReduction(reducedMatrix, col) {
col.fill(INF);
for (let i = 0; i < N; i++) {
for (let j = 0; j < N; j++) {
if (reducedMatrix[i][j] < col[j]) {
col[j] = reducedMatrix[i][j];
}
}
}
for (let i = 0; i < N; i++) {
for (let j = 0; j < N; j++) {
if (reducedMatrix[i][j] !== INF && col[j] !== INF) {
reducedMatrix[i][j] -= col[j];
}
}
}
return 0;
}
function calculateCost(reducedMatrix) {
let cost = 0;
const row = Array(N).fill(0);
const col = Array(N).fill(0);
rowReduction(reducedMatrix, row);
columnReduction(reducedMatrix, col);
for (let i = 0; i < N; i++) {
cost += row[i] !== INF ? row[i] : 0;
cost += col[i] !== INF ? col[i] : 0;
}
return cost;
}
function printPath(list) {
for (const path of list) {
console.log(`${path[0] + 1} -> ${path[1] + 1}`);
}
}
function solve(CostGraphMatrix) {
const pq = new PriorityQueue((a, b) => a.cost - b.cost);
const v = [];
const root = newNode(CostGraphMatrix, v, 0, -1, 0);
root.cost = calculateCost(root.reducedMatrix);
pq.enqueue(root);
while (!pq.isEmpty()) {
const min = pq.dequeue();
const i = min.vertex;
if (min.level === N - 1) {
min.path.push([i, 0]);
printPath(min.path);
return min.cost;
}
for (let j = 0; j < N; j++) {
if (min.reducedMatrix[i][j] !== INF) {
const child = newNode(min.reducedMatrix, min.path, min.level + 1, i, j);
child.cost = min.cost + min.reducedMatrix[i][j] + calculateCost(child.reducedMatrix);
pq.enqueue(child);
}
}
}
return 0;
}
class PriorityQueue {
constructor(comparator) {
this.heap = [];
this.comparator = comparator || ((a, b) => a - b);
}
enqueue(element) {
this.heap.push(element);
this.bubbleUp();
}
dequeue() {
const min = this.heap[0];
const last = this.heap.pop();
if (this.heap.length > 0) {
this.heap[0] = last;
this.bubbleDown();
}
return min;
}
isEmpty() {
return this.heap.length === 0;
}
bubbleUp() {
let index = this.heap.length - 1;
while (index > 0) {
const parentIndex = Math.floor((index - 1) / 2);
if (this.comparator(this.heap[index], this.heap[parentIndex]) >= 0) {
break;
}
[this.heap[parentIndex], this.heap[index]] = [this.heap[index], this.heap[parentIndex]];
index = parentIndex;
}
}
bubbleDown() {
let index = 0;
while (index < this.heap.length) {
const left = 2 * index + 1;
const right = 2 * index + 2;
let smallest = index;
if (left < this.heap.length && this.comparator(this.heap[left], this.heap[smallest]) < 0) {
smallest = left;
}
if (right < this.heap.length && this.comparator(this.heap[right], this.heap[smallest]) < 0) {
smallest = right;
}
if (smallest === index) {
break;
}
[this.heap[index], this.heap[smallest]] = [this.heap[smallest], this.heap[index]];
index = smallest;
}
}
}
const CostGraphMatrix = [
[INF, 10, 15, 20],
[10, INF, 35, 25],
[15, 35, INF, 30],
[20, 25, 30, INF]
];
console.log("Total cost is " + solve(CostGraphMatrix));
Output1 -> 3
3 -> 4
4 -> 2
2 -> 1
Total cost is 80
Time Complexity: O(2N * N2) where N = number of node/ cities.
Space Complexity: O(N2)
Share your thoughts in the comments
Please Login to comment...