Dijkstra’s shortest path with minimum edges
Last Updated :
10 Feb, 2023
Prerequisite: Dijkstra’s shortest path algorithm
Given an adjacency matrix graph representing paths between the nodes in the given graph. The task is to find the shortest path with minimum edges i.e. if there a multiple short paths with same cost then choose the one with the minimum number of edges.
Consider the graph given below:
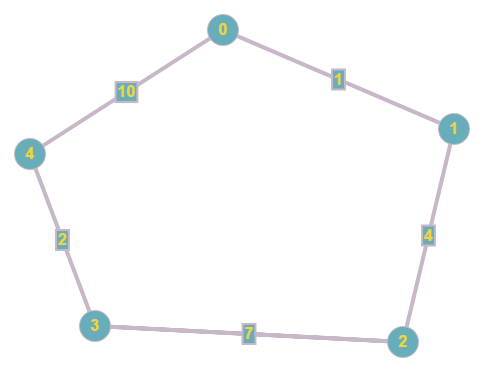
There are two paths from vertex 0 to vertex 3 with the weight of 12:
0 -> 1 -> 2 -> 3
0 -> 4 -> 3
Since, Dijkstra’s algorithm is a greedy algorithm that seeks the minimum weighted vertex on every iteration, so the original Dijkstra’s algorithm will output the first path but the result should be the second path as it contains minimum number of edges.
Examples:
Input: graph[][] = { {0, 1, INFINITY, INFINITY, 10},
{1, 0, 4, INFINITY, INFINITY},
{INFINITY, 4, 0, 7, INFINITY},
{INFINITY, INFINITY, 7, 0, 2},
{10, INFINITY, INFINITY, 2, 0} };
Output: 0->4->3
INFINITY here shows that u and v are not neighbors
Input: graph[][] = { {0, 5, INFINITY, INFINITY},
{5, 0, 5, 10},
{INFINITY, 5, 0, 5},
{INFINITY, 10, 5, 0} };
Output: 0->1->3
Approach: The idea of the algorithm is to use the original Dijkstra’s algorithm, but also to keep track on the length of the paths by an array that stores the length of the paths from the source vertex, so if we find a shorter path with the same weight, then we will take it.
Let’s follow the upper example iteration by iteration:
Consider we want to find the shortest path from vertex 0 to vertex 3
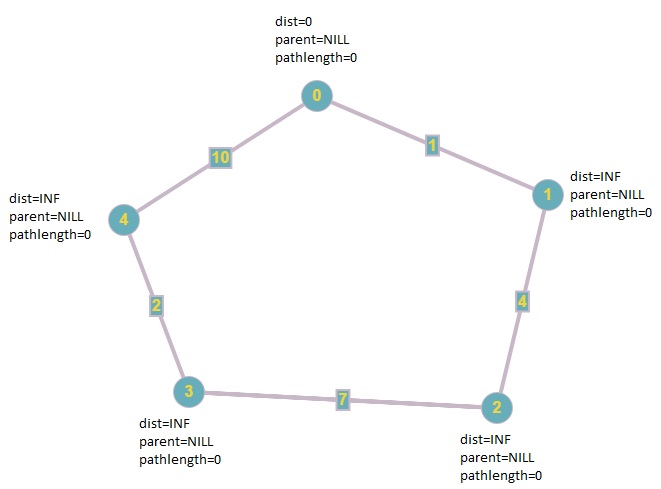
Initial state: The distance and the parent of all vertices are Infinity and NILL respectively, as usual. ‘
But now, we have one more array called pathlength[] that stores the length of the path from the source vertex to all of the vertices.
Initially, we set all the elements of pathlength[] to 0.
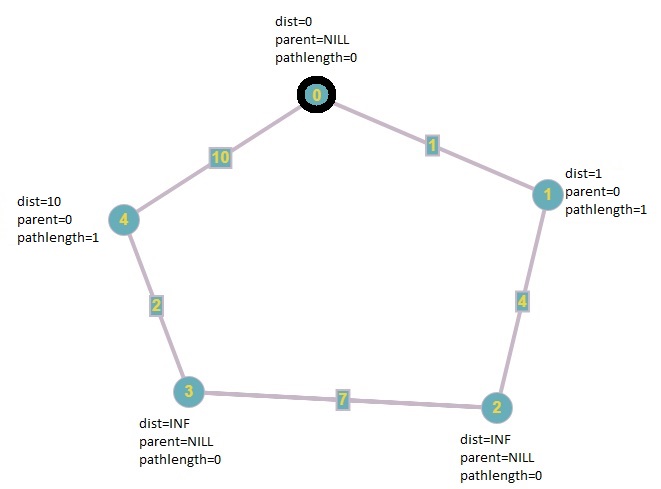
First iteration: First we seek the vertex which contains the minimum distance which is vertex 0, as shown in the image above.
Then, we traverse all its neighbors which are not blackened, which are 1 and 4. Since, the distance of vertex 1 and 4 are infinity, then we reduce their weights to 1 and 10 respectively. Update the parents, and set the pathlength[] for each vertex (1 and 4) to 1 because they can be reached from source vertex by 1 edge.
After that, we blacken the vertex as the original Dijkstra’s algorithm does.
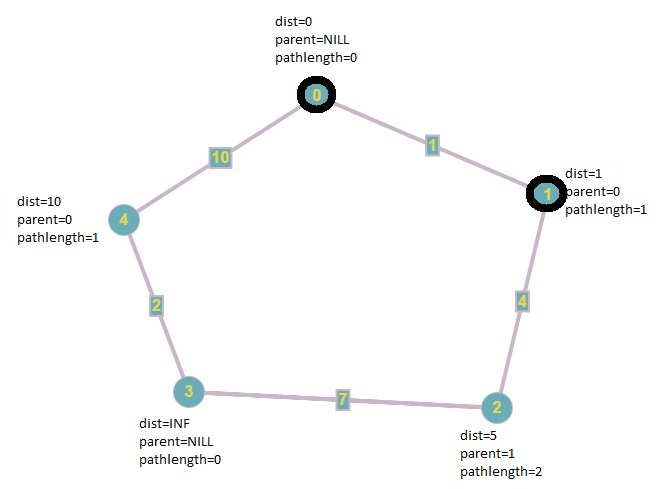
Second iteration: We continue to seek the non-blakened vertex which contains the minimum distance, which is vertex 1, and after that we reduce its neighbor’s weight to 1 + 4 = 5 and update its parent as the original Dijkstra’s algorithm does, and set its pathlength[] to 2, because it is two edges away from the source vertex.
Finally, we blacken vertex 1.
Third iteration: Again, the non-blackened vertex which contains the minimum distance is vertex 2, so we update the non-blackened neighbors. It has one non-blackened neighbor which is vertex 3. So, we update its weight from Infinity to 5 + 7 = 12 then we set its parent to 2 and set its pathlength[] to 3 because it is 3 edges sway from the source vertex.
Finally, we blacken vertex 2.
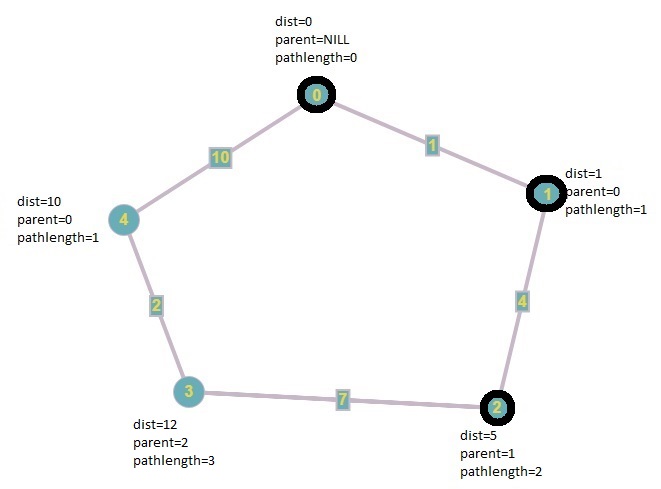
Fourth iteration: In this iteration, the algorithm acts different from the original Dijkstra’s algorithm. We seek the non-blackened vertex which contains the minimum distance which is 4. Since, the distance to vertex 3 from the source vertex is 12 (0->1->2->3) and the distance of vertex 4 plus the edge (4, 3) is 12, it means that we just found a new path to vertex 3 from the source vertex with the same weight. Then, we check if the new path is shorter (in edges) than the existing one and we take the one with the minimum edges.
Finally, we blacken vertex 4.
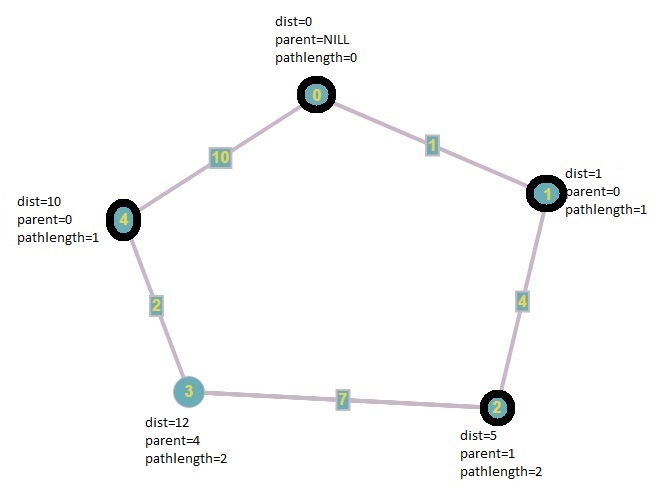
Since V-1 vertices are blackened, the algorithm ends.
Below is the implementation of the above approach:
C++
#include <iostream>
using namespace std;
#define INFINITY 9999
#define n 5
#define s 0
#define d 3
#define NILL -1
int MinDistance(int*, int*);
void PrintPath(int*, int);
void Dijkstra(int Graph[n][n], int _n, int _s, int _d)
{
int i, u, v, count;
int dist[n];
int Blackened[n] = { 0 };
int pathlength[n] = { 0 };
int parent[n];
parent[_s] = NILL;
for (i = 0; i < n; i++)
dist[i] = INFINITY;
dist[_s] = 0;
for (count = 0; count < n - 1; count++) {
u = MinDistance(dist, Blackened);
if (u == INFINITY)
break;
else {
Blackened[u] = 1;
for (v = 0; v < n; v++) {
if (!Blackened[v] && Graph[u][v]
&& dist[u] + Graph[u][v] <= dist[v]
&& pathlength[u] + 1 < pathlength[v]) {
parent[v] = u;
pathlength[v] = pathlength[u] + 1;
}
}
}
}
if (dist[_d] != INFINITY)
PrintPath(parent, _d);
else
cout << "There is no path between vertex "
<< _s << "to vertex " << _d;
}
int MinDistance(int* dist, int* Blackened)
{
int min = INFINITY, min_index, v;
for (v = 0; v < n; v++)
if (!Blackened[v] && dist[v] < min) {
min = dist[v];
min_index = v;
}
return min == INFINITY ? INFINITY : min_index;
}
void PrintPath(int* parent, int _d)
{
if (parent[_d] == NILL) {
cout << _d;
return;
}
PrintPath(parent, parent[_d]);
cout << "->" << _d;
}
int main()
{
int Graph[n][n] = { { 0, 1, INFINITY, INFINITY, 10 },
{ 1, 0, 4, INFINITY, INFINITY },
{ INFINITY, 4, 0, 7, INFINITY },
{ INFINITY, INFINITY, 7, 0, 2 },
{ 10, INFINITY, INFINITY, 2, 0 } };
Dijkstra(Graph, n, s, d);
return 0;
}
|
Java
import java.io.*;
import java.util.*;
class GFG
{
static int INFINITY = 9999, n = 5, s = 0, d = 3, NILL = -1;
static void Dijkstra(int[][] Graph, int _n, int _s, int _d)
{
int i, u, v, count;
int[] dist = new int[n];
int[] Blackened = new int[n];
int[] pathlength = new int[n];
int[] parent = new int[n];
parent[_s] = NILL;
for (i = 0; i < n; i++)
dist[i] = INFINITY;
dist[_s] = 0;
for (count = 0; count < n - 1; count++)
{
u = MinDistance(dist, Blackened);
if (u == INFINITY)
break;
else
{
Blackened[u] = 1;
for (v = 0; v < n; v++)
{
if (Blackened[v] == 0 && Graph[u][v] != 0
&& dist[u] + Graph[u][v] < dist[v])
{
parent[v] = u;
pathlength[v] = pathlength[parent[v]] + 1;
dist[v] = dist[u] + Graph[u][v];
}
else if (Blackened[v] == 0 && Graph[u][v] != 0
&& dist[u] + Graph[u][v] == dist[v]
&& pathlength[u] + 1 < pathlength[v])
{
parent[v] = u;
pathlength[v] = pathlength[u] + 1;
}
}
}
}
if (dist[_d] != INFINITY)
PrintPath(parent, _d);
else
System.out.println("There is not path between vertex " +
_s + " to vertex " + _d);
}
static int MinDistance(int[] dist, int[] Blackened)
{
int min = INFINITY, min_index = -1, v;
for (v = 0; v < n; v++)
if (Blackened[v] == 0 && dist[v] < min)
{
min = dist[v];
min_index = v;
}
return min == INFINITY ? INFINITY : min_index;
}
static void PrintPath(int[] parent, int _d)
{
if (parent[_d] == NILL)
{
System.out.print(_d);
return;
}
PrintPath(parent, parent[_d]);
System.out.print("->" + _d);
}
public static void main(String[] args)
{
int[][] Graph = { { 0, 1, INFINITY, INFINITY, 10 },
{ 1, 0, 4, INFINITY, INFINITY },
{ INFINITY, 4, 0, 7, INFINITY },
{ INFINITY, INFINITY, 7, 0, 2 },
{ 10, INFINITY, INFINITY, 2, 0 } };
Dijkstra(Graph, n, s, d);
}
}
|
Python3
def Dijkstra(Graph, _s, _d):
row = len(Graph)
col = len(Graph[0])
dist = [float("Inf")] * row
Blackened =[0] * row
pathlength =[0] * row
parent = [-1] * row
dist[_s]= 0
for count in range(row-1):
u = MinDistance(dist, Blackened)
if u == float("Inf"):
break
else:
Blackened[u]= 1
for v in range(row):
if Blackened[v]== 0 and Graph[u][v] and dist[u]+Graph[u][v]<dist[v]:
parent[v]= u
pathlength[v]= pathlength[parent[v]]+1
dist[v]= dist[u]+Graph[u][v]
elif Blackened[v]== 0 and Graph[u][v] and dist[u]+Graph[u][v]== dist[v] and pathlength[u]+1<pathlength[v]:
parent[v]= u
pathlength[v] = pathlength[u] + 1
if dist[_d]!= float("Inf"):
PrintPath(parent, _d)
else:
print("There is no path between vertex ", _s, "to vertex ", _d)
def PrintPath(parent, _d):
if parent[_d]==-1:
print(_d,end='')
return
PrintPath(parent, parent[_d])
print("->", _d,end='')
def MinDistance(dist, Blackened):
min = float("Inf")
for v in range(len(dist)):
if not Blackened[v] and dist[v]<min:
min = dist[v]
Min_index = v
return float("Inf") if min == float("Inf") else Min_index
Graph =[[0, 1, float("Inf"), float("Inf"), 10],
[1, 0, 4, float("Inf"), float("Inf")],
[float("Inf"), 4, 0, 7, float("Inf")],
[float("Inf"), float("Inf"), 7, 0, 2],
[10, float("Inf"), float("Inf"), 2, 0]]
Dijkstra(Graph, 0, 3)
|
C#
using System;
class GFG
{
static int INFINITY = 9999, n = 5, s = 0, d = 3, NILL = -1;
static void Dijkstra(int [,] Graph, int _n, int _s, int _d)
{
int i, u, v, count;
int[] dist = new int[n];
int[] Blackened = new int[n];
int[] pathlength = new int[n];
int[] parent = new int[n];
parent[_s] = NILL;
for (i = 0; i < n; i++)
dist[i] = INFINITY;
dist[_s] = 0;
for (count = 0; count < n - 1; count++)
{
u = MinDistance(dist, Blackened);
if (u == INFINITY)
break;
else
{
Blackened[u] = 1;
for (v = 0; v < n; v++)
{
if (Blackened[v] == 0 && Graph[u,v] != 0
&& dist[u] + Graph[u,v] < dist[v])
{
parent[v] = u;
pathlength[v] = pathlength[parent[v]] + 1;
dist[v] = dist[u] + Graph[u,v];
}
else if (Blackened[v] == 0 && Graph[u,v] != 0
&& dist[u] + Graph[u,v] == dist[v]
&& pathlength[u] + 1 < pathlength[v])
{
parent[v] = u;
pathlength[v] = pathlength[u] + 1;
}
}
}
}
if (dist[_d] != INFINITY)
PrintPath(parent, _d);
else
Console.Write("There is not path between vertex " +
_s + " to vertex " + _d);
}
static int MinDistance(int[] dist, int[] Blackened)
{
int min = INFINITY, min_index = -1, v;
for (v = 0; v < n; v++)
if (Blackened[v] == 0 && dist[v] < min)
{
min = dist[v];
min_index = v;
}
return min == INFINITY ? INFINITY : min_index;
}
static void PrintPath(int[] parent, int _d)
{
if (parent[_d] == NILL)
{
Console.Write(_d);
return;
}
PrintPath(parent, parent[_d]);
Console.Write("->" + _d);
}
public static void Main()
{
int [,] Graph = { { 0, 1, INFINITY, INFINITY, 10 },
{ 1, 0, 4, INFINITY, INFINITY },
{ INFINITY, 4, 0, 7, INFINITY },
{ INFINITY, INFINITY, 7, 0, 2 },
{ 10, INFINITY, INFINITY, 2, 0 } };
Dijkstra(Graph, n, s, d);
}
}
|
Javascript
const n = 5;
const s = 0;
const d = 3;
const NILL = -1;
const INFINITY = 9999;
function MinDistance(dist, Blackened) {
let min = INFINITY;
let min_index;
for (let v = 0; v < n; v++) {
if (!Blackened[v] && dist[v] < min) {
min = dist[v];
min_index = v;
}
}
return min === INFINITY ? INFINITY : min_index;
}
function PrintPath(parent, _d) {
if (parent[_d] === NILL) {
console.log(_d);
return;
}
PrintPath(parent, parent[_d]);
console.log("->" + _d);
}
function Dijkstra(Graph, _n, _s, _d) {
let i, u, v, count;
let dist = new Array(n).fill(INFINITY);
let Blackened = new Array(n).fill(0);
let pathlength = new Array(n).fill(0);
let parent = new Array(n).fill(NILL);
parent[_s] = NILL;
dist[_s] = 0;
for (count = 0; count < n - 1; count++) {
u = MinDistance(dist, Blackened);
if (u === INFINITY) break;
else {
Blackened[u] = 1;
for (v = 0; v < n; v++) {
if (!Blackened[v] && Graph[u][v] && dist[u] + Graph[u][v] <= dist[v] && pathlength[u] + 1 < pathlength[v]) {
parent[v] = u;
pathlength[v] = pathlength[u] + 1;
}
}
}
}
if (dist[_d] !== INFINITY) PrintPath(parent, _d);
else console.log("There is no path between vertex " + _s + " to vertex " + _d);
}
const Graph = [ [0, 1, INFINITY, INFINITY, 10],
[1, 0, 4, INFINITY, INFINITY],
[INFINITY, 4, 0, 7, INFINITY],
[INFINITY, INFINITY, 7, 0, 2],
[10, INFINITY, INFINITY, 2, 0]
];
Dijkstra(Graph, n, s, d);
|
Output
There is no path between vertex 0to vertex 3
Complexity Analysis:
- Time Complexity: O(V^2) where V is the number of vertices and E is the number of edges.
- Auxiliary Space: O(V + E)
Share your thoughts in the comments
Please Login to comment...