Maximum mode configuration of 8086 microprocessor (Max mode)
Last Updated :
29 Dec, 2021
8086 microprocessor characteristics:
- It contains 20 bit address bus.
- It contains 16-bit data bus, therefore 8086 is called as 16-bit microprocessor.
- It is 2-stage pipelined processor. It can prefetch 6 bytes from memory and store into queue to increase the speed of the execution.
- It’s control bus carries signals for executing operations such as read ,write etc.
- It has Memory Banks. 2 banks of 512KB each. These banks are called as lower Bank (even) and higher Bank (odd).
- In 8086 the entire memory is divided into four memory segments which are code ,stack, data and extra segment.
- 8086 has 16 bit IO address.
- It has 256 interrupts.
8086 has two operating Modes:
- Minimum mode
- Maximum mode
Minimum mode:
- In this 8086 is the only processor in the system . In a minimum mode 8086 system.
- 8086 is operated in minimum mode when MN/MX’ pin to logic 1.
- In this mode, all the control signals are given out by the 8086 itself.
Maximum mode:
- In this we can connect more processors to 8086 (8087/8089).
- 8086 max mode is basically for implementation of allocation of global resources and passing bus control to other coprocessor(i.e. second processor in the system), because two processors can not access system bus at same instant.
- All processors execute their own program.
- The resources which are common to all processors are known as global resources.
- The resources which are allocated to a particular processor are known as local or private resources.

Maximum mode circuit
Circuit explanation:
- When MN/ MX’ = 0 , 8086 works in max mode.
- Clock is provided by 8284 clock generator.
- 8288 bus controller- Address form the address bus is latched into 8282 8-bit latch. Three such latches are required because address bus is 20 bit. The ALE(Address latch enable) is connected to STB(Strobe) of the latch. The ALE for latch is given by 8288 bus controller.
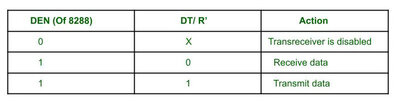
- The data bus is operated through 8286 8-bit transceiver. Two such transceivers are required, because data bus is 16-bit. The transceivers are enabled the DEN signal, while the direction of data is controlled by the DT/R signal. DEN is connected to OE’ and DT/ R’ is connected to T. Both DEN and DT/ R’ are given by 8288 bus controller.
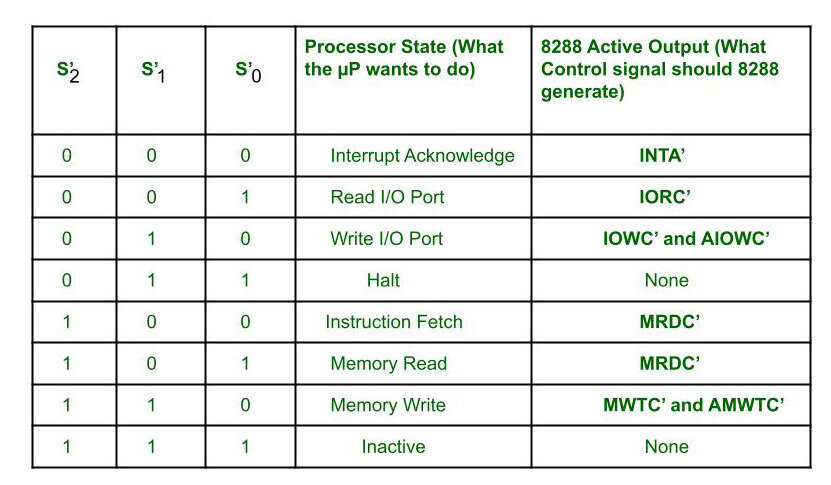
- Control signals for all operations are generated by decoding S’2, S’1 and S’0 using 8288 bus controller.
- Bus request is done using RQ’ / GT’ lines interfaced with 8086. RQ0/GT0 has more priority than RQ1/GT1.
- INTA’ is given by 8288, in response to an interrupt on INTR line of 8086.
- In max mode, the advanced write signals get enabled one T-state in advance as compared to normal write signals. This gives slower devices more time to get ready to accept the data, therefore it reduces the number of cycles.
Advantages of max mode of 8086:
- It helps to interface more devices like 8087.This interface is also called a closely coupled co-Processor configuration. In this 8086 is called as the host and 8087 as Co-processor.
- It supports multiprocessing, Therefore it helps to increase the efficiency.
- The 8087 was the first floating-point coprocessor for the 8086 series of microprocessors. The purpose of the 8087 was to increase calculations for floating point operations, such as add, sub, multiply, divide, and square root.
Disadvantages of max mode over min mode :
- It has more complex circuit than min mode.
Applications of 8086:
- Microcomputer are built using 8086. For example : IBM PC, used the Intel 8088, a version of the 8086 with 8-bit data bus.
- It is used in calculators.
- It is used for control purposes like in traffic signals(uses micro controllers which are nothing but contains one or more CPUs along with memory and programmable i/o peripherals).
Share your thoughts in the comments
Please Login to comment...