Partition Allocation Methods in Memory Management
Last Updated :
08 Mar, 2024
In the operating system, the following are four common memory management techniques.
Single contiguous allocation: Simplest allocation method used by MS-DOS. All memory (except some reserved for OS) is available to a process.
Partitioned allocation: Memory is divided into different blocks or partitions. Each process is allocated according to the requirement.
Paged memory management: Memory is divided into fixed-sized units called page frames, used in a virtual memory environment.
Segmented memory management: Memory is divided into different segments (a segment is a logical grouping of the process’ data or code).In this management, allocated memory doesn’t have to be contiguous.
Most of the operating systems (for example Windows and Linux) use Segmentation with Paging. A process is divided into segments and individual segments have pages.
In Partition Allocation, when there is more than one partition freely available to accommodate a process’s request, a partition must be selected. To choose a particular partition, a partition allocation method is needed. A partition allocation method is considered better if it avoids internal fragmentation.
When it is time to load a process into the main memory and if there is more than one free block of memory of sufficient size then the OS decides which free block to allocate.
There are different Placement Algorithm:
A. First Fit
B. Best Fit
C. Worst Fit
D. Next Fit
1. First Fit: In the first fit, the partition is allocated which is the first sufficient block from the top of Main Memory. It scans memory from the beginning and chooses the first available block that is large enough. Thus it allocates the first hole that is large enough.
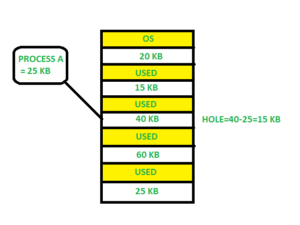
2. Best Fit Allocate the process to the partition which is the first smallest sufficient partition among the free available partition. It searches the entire list of holes to find the smallest hole whose size is greater than or equal to the size of the process.

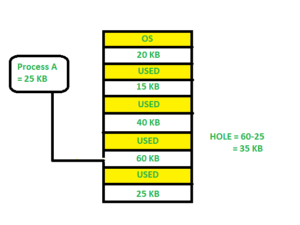
3. Worst Fit Allocate the process to the partition which is the largest sufficient among the freely available partitions available in the main memory. It is opposite to the best-fit algorithm. It searches the entire list of holes to find the largest hole and allocate it to process.
4. Next Fit: Next fit is similar to the first fit but it will search for the first sufficient partition from the last allocation point.
Is Best-Fit really best?
Although best fit minimizes the wastage space, it consumes a lot of processor time for searching the block which is close to the required size. Also, Best-fit may perform poorer than other algorithms in some cases. For example, see the below exercise.
Comparison of Partition Allocation Methods:
|
Sl.No.
|
Partition Allocation Method
|
Advantages
|
Disadvantages
|
|
1.
|
Fixed Partition
|
Simple, easy to use, no complex algorithms needed
|
Memory waste, inefficient use of memory resources
|
|
2.
|
Dynamic Partition
|
Flexible, more efficient, partitions allocated as required
|
Requires complex algorithms for memory allocation
|
|
3.
|
Best-fit Allocation
|
Minimizes memory waste, allocates smallest suitable partition
|
More computational overhead to find smallest split
|
|
4.
|
Worst-fit Allocation
|
Ensures larger processes have sufficient memory
|
May result in substantial memory waste
|
|
5.
|
First-fit Allocation
|
Quick, efficient, less computational work
|
Risk of memory fragmentation
|
Exercise: Consider the requests from processes in given order 300K, 25K, 125K, and 50K. Let there be two blocks of memory available of size 150K followed by a block size 350K.
Which of the following partition allocation schemes can satisfy the above requests?
A) Best fit but not first fit.
B) First fit but not best fit.
C) Both First fit & Best fit.
D) neither first fit nor best fit.
Solution: Let us try all options.
Best Fit:
300K is allocated from a block of size 350K. 50 is left in the block.
25K is allocated from the remaining 50K block. 25K is left in the block.
125K is allocated from 150 K block. 25K is left in this block also.
50K can’t be allocated even if there is 25K + 25K space available.
First Fit:
300K request is allocated from 350K block, 50K is left out.
25K is allocated from the 150K block, 125K is left out.
Then 125K and 50K are allocated to the remaining left out partitions.
So, the first fit can handle requests.
So option B is the correct choice.
Share your thoughts in the comments
Please Login to comment...