Python – Inverse Gaussian Distribution in Statistics
Last Updated :
10 Jan, 2020
scipy.stats.invgauss() is an inverted gauss continuous random variable. It is inherited from the of generic methods as an instance of the rv_continuous class. It completes the methods with details specific for this particular distribution.
Parameters :
a : shape parameter
c : special case of gengauss. Default equals to c = -1
Code #1 : Creating Inverse Gaussian continuous random variable
from scipy.stats import invgauss
numargs = invgauss.numargs
[a, b] = [0.7, 0.4] * numargs
rv = invgauss (a, b)
print ("RV : \n", rv)
|
Output :
RV :
scipy.stats._distn_infrastructure.rv_frozen object at 0x1a220d7bd0
Code #2 : Inverse Gaussian continuous variates and probability distribution
import numpy as np
quantile = np.arange (0.01, 1)
R = invgauss.ppf(0.01, a)
print ("Random Variates : \n", R)
R = invgauss.pdf(invgauss.ppf(0.01, a), a)
print ("\nProbability Distribution : \n", R)
|
Output :
Random Variates :
0.25801533159920903
Probability Distribution :
0.15984442779701688
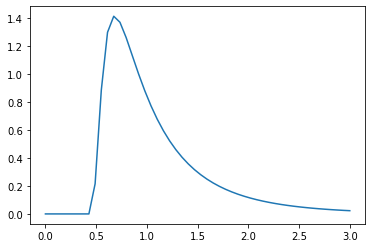
Code #3 : Graphical Representation.
import numpy as np
import matplotlib.pyplot as plt
distribution = np.linspace(0, np.minimum(rv.dist.b, 3))
print("Distribution : \n", distribution)
plot = plt.plot(distribution, rv.pdf(distribution))
|
Output :
Distribution :
[0. 0.06122449 0.12244898 0.18367347 0.24489796 0.30612245
0.36734694 0.42857143 0.48979592 0.55102041 0.6122449 0.67346939
0.73469388 0.79591837 0.85714286 0.91836735 0.97959184 1.04081633
1.10204082 1.16326531 1.2244898 1.28571429 1.34693878 1.40816327
1.46938776 1.53061224 1.59183673 1.65306122 1.71428571 1.7755102
1.83673469 1.89795918 1.95918367 2.02040816 2.08163265 2.14285714
2.20408163 2.26530612 2.32653061 2.3877551 2.44897959 2.51020408
2.57142857 2.63265306 2.69387755 2.75510204 2.81632653 2.87755102
2.93877551 3. ]
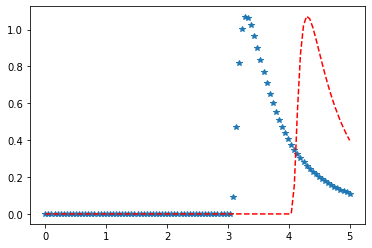
Code #4 : Varying Positional Arguments
import matplotlib.pyplot as plt
import numpy as np
x = np.linspace(0, 5, 100)
y1 = invgauss .pdf(x, 1, 3)
y2 = invgauss .pdf(x, 1, 4)
plt.plot(x, y1, "*", x, y2, "r--")
|
Output :
Like Article
Suggest improvement
Share your thoughts in the comments
Please Login to comment...