ML | DBSCAN reachability and connectivity
Last Updated :
20 May, 2019
Prerequisite : DBSCAN Clustering in ML
Density-based clustering algorithm has played a vital role in finding nonlinear shapes structure based on the density. Density-Based Spatial Clustering of Applications with Noise (DBSCAN) is the most widely used density-based algorithm. It uses the concept of density reachability and density connectivity.
Consider a set of points in some space to be clustered using DBSCAN clustering. Let ε be the radius of a neighborhood with respect to some point and core objects are the objects whose ε-neighborhood contains at least MinPts number of objects.
Reachability –
Here density reachability is not symmetric. As q is not a core point thus qn-1 is not directly density-reachable from q, so object p is not density-reachable from object q.
Connectivity –
- Density connectivity: Object q is density-connected to object p w.r.t ε and MinPts if there is an object o such that both p and q are density-reachable from o w.r.t ε and MinPts.
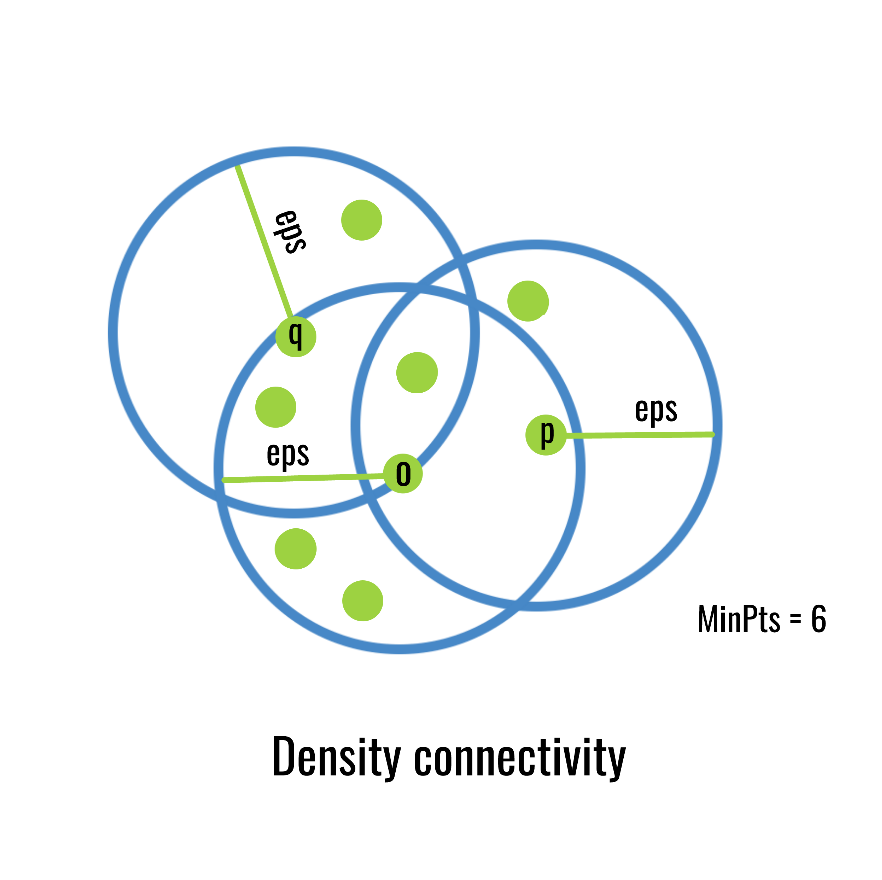
Here density connectivity is symmetric. If object q is density-connected to object p then object p is also density-connected to object q.
Based on the above two concepts reachability and connectivity we can define the cluster and noise points.
Cluster:
A cluster C w.r.t. ε and MinPts is a non empty subset of D (the whole set of objects or instances) satisfying –
- Maximality: For all objects p, q if p ε C and if q is density-reachable from p w.r.t ε and MinPts then q ε C.
- Connectivity: For all objects p, q ε C, p is density-connected to q and vice-versa w.r.t. ε and MinPts.
Noise:
Objects which are not directly density-reachable from at least one core object are known as Noise points.
Like Article
Suggest improvement
Share your thoughts in the comments
Please Login to comment...