Feedback Structure of a Real-time System
Last Updated :
23 Apr, 2023
Real-time System is a type of computational system which is used for carrying out some specific tasks. These specific tasks are related with time constraints. The tasks related with real-time system need to be completed in given time interval.
Feedback Structure of a Real-time System : In a real-time system, different components of system are naturally widely distributed. Distributed and centralized both real-time systems have feedback structure. The feedback structure of a real-time system includes various hardware and software devices embedded in such way that specific tasks can be performed in time constraints allowed. The accuracy and correctness involved in real-time system makes model complex. Feedback structure of real-time system is quite different from basic model of real-time system. Here we will have a closer look on the feedback structure model of real-time system which has some commonly used terms and hardware.
Following diagram represents feedback structure of Real-time System : 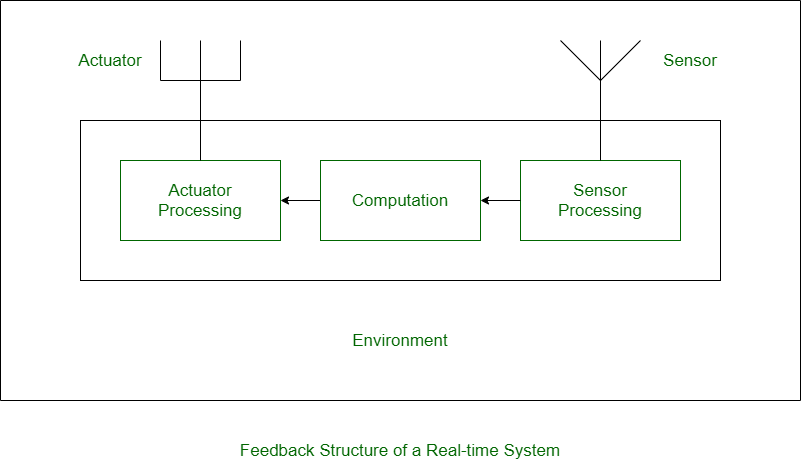
- Sensor – Sensor is used to sense environment periodically. It is used for conversion of some physical events or characteristics into electrical signals. This is a hardware device that takes input from environment and gives output to system. The sensed data from environment is processed to determine corrective actions necessary.
- Sensor Processing – When data is sensed from environment from sensor, it makes data ready for computation process. It involves conditioning and other processes. This process is required to obtained data in compatible form for computation in system.
- Computation – Computation is process of calculating and operations needed for task to be completed. This is main process that happens inside real-time system. It takes data input from sensor and gives output to actuator of real-time system.
- Actuator Processing – It is just like sensor processing but does reverse work. It takes input form system and gives this to actuator of system. This is basically used to make output compatible with environment so that user can easily understand obtained output.
- Actuator – Actuator is reverse device of sensor. While sensor is used to convert physical events into electrical signals, actuator is used to do reverse. It is used to convert electrical signals into physical events or characteristics. It takes input from the system and gives output to environment. The output obtained from actuator may be in any form of physical action. Motors and heaters are some of commonly used actuators.
Like Article
Suggest improvement
Share your thoughts in the comments
Please Login to comment...