Feature matching using ORB algorithm in Python-OpenCV
Last Updated :
03 Jan, 2023
ORB is a fusion of FAST keypoint detector and BRIEF descriptor with some added features to improve the performance. FAST is Features from Accelerated Segment Test used to detect features from the provided image. It also uses a pyramid to produce multiscale-features. Now it doesn’t compute the orientation and descriptors for the features, so this is where BRIEF comes in the role.
ORB uses BRIEF descriptors but as the BRIEF performs poorly with rotation. So what ORB does is to rotate the BRIEF according to the orientation of keypoints. Using the orientation of the patch, its rotation matrix is found and rotates the BRIEF to get the rotated version. ORB is an efficient alternative to SIFT or SURF algorithms used for feature extraction, in computation cost, matching performance, and mainly the patents. SIFT and SURF are patented and you are supposed to pay them for its use. But ORB is not patented.
In this tutorial, we are going to learn how to find the features in an image and match them with the other images in a continuous Video.
Algorithm
- Take the query image and convert it to grayscale.
- Now Initialize the ORB detector and detect the keypoints in query image and scene.
- Compute the descriptors belonging to both the images.
- Match the keypoints using Brute Force Matcher.
- Show the matched images.
Below is the implementation.
Input image:
Python3
import numpy as np
import cv2
query_img = cv2.imread('query.jpg')
train_img = cv2.imread('train.jpg')
query_img_bw = cv2.cvtColor(query_img,cv2.COLOR_BGR2GRAY)
train_img_bw = cv2.cvtColor(train_img, cv2.COLOR_BGR2GRAY)
orb = cv2.ORB_create()
queryKeypoints, queryDescriptors = orb.detectAndCompute(query_img_bw,None)
trainKeypoints, trainDescriptors = orb.detectAndCompute(train_img_bw,None)
matcher = cv2.BFMatcher()
matches = matcher.match(queryDescriptors,trainDescriptors)
final_img = cv2.drawMatches(query_img, queryKeypoints,
train_img, trainKeypoints, matches[:20],None)
final_img = cv2.resize(final_img, (1000,650))
cv2.imshow("Matches", final_img)
cv2.waitKey(3000)
|
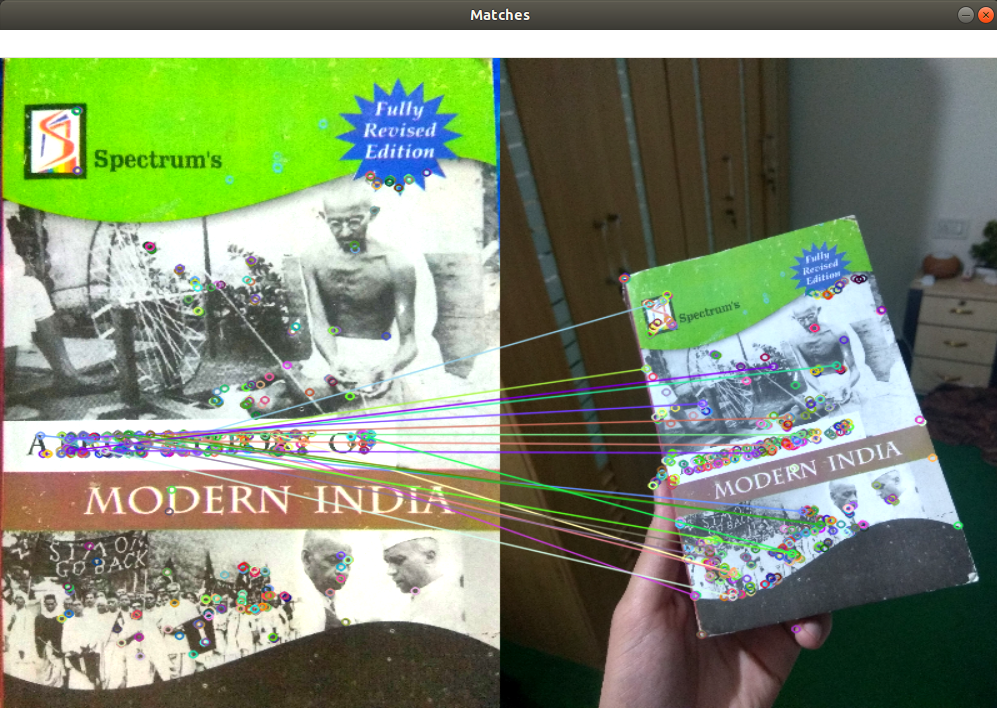
Output:
Like Article
Suggest improvement
Share your thoughts in the comments
Please Login to comment...