Difference between STING and OPTICS
Last Updated :
03 Aug, 2022
The method of identifying similar groups of data in a data set is called clustering. Entities in each group are comparatively more similar to entities of that group than those of the other groups.
STING (Statistical Information Grid Clustering Algorithm) and OPTICS (Ordering Point To Identify Clustering Structure Clustering Algorithm) are clustering algorithms used in Unsupervised Learning. They are machine learning techniques which are used to club the given input data points into clusters or groups on the basis of their attributes. STING is grid-based clustering algorithm while OPTICS is a density-based clustering algorithm. Clustering
These are some differences between STING and OPTICS.
| S.No. |
STING |
OPTICS |
| 1. |
STING is abbreviation for Statistical Information Grid |
OPTICS is abbreviation for Ordering Point To Identify Clustering Structure |
| 2. |
It is grib based clustering algorithm |
It is density based clustering algorithm |
| 3. |
It concerns not with data points but with the value space that surrounds the data points. |
It searches the data space for areas of varied density data points in the data space. |
| 4. |
It uses multi-dimensional grid data structure that quantizes space into a finite number of cells. |
It is an extension to Density Based spatial clustering of applications with noise. |
| 5. |
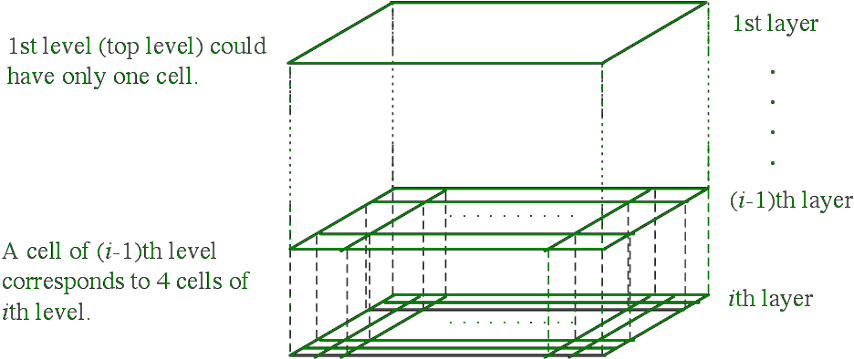
The following are the properties of STING clustering algorithm:
- Spatial area is divided into rectangular cells.
- Several level of cells at different levels of resolution.
- High level cell is partitioned into several low level cells.
- Statistically attributes are stored in cell for instance Mean, Maximum, Minimum are some of the statistical measures which are used.
- Statistical information is calculated for each cell and the types of distribution calculated are normal and exponential.
|
The following are the properties of OPTICS clustering algorithm:
- It is an extension of DBSCAN, which takes the responsibility of parameters that can lead to discovery of unacceptable clusters.
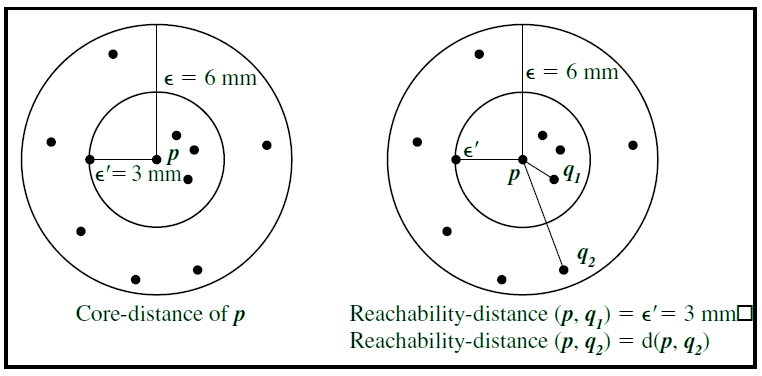
- Core distance is the smallest point that make a point core.
- Two important parameters are required for OPTICS: epsilon(“eps) and minimum points(“MinPts).
- The parameter eps defines the radius of neighborhood around a point P. The parameter MinPts is the minimum no. of neighbors within “eps”radius.
- Density = No. of points within a specified radius r(eps)
|
| 6. |
It has relatively less computational complexity. |
It has relatively more computational complexity. |
STING Algorithm:
- Determine a layer, to begin with.
- For each cell of this layer, we calculate the confidence interval (or estimated range) of probability that this cell is relevant to the query.
- From the interval calculate above, we label the cell as relevant or not relevant.
- If this is the bottom layer, then end the process.
- We go down the hierarchy structure by one level. Go to Step 2 for those levels that form the relevant cells of the higher-level layer.
STING Hierarchy Diagram :
OPTICS Algorithm:
Core distance of a point P is the smallest distance such that the neighborhood of P has atleast minPts points.
Reachability distance of p from q1 is the core distance ( ε’ ).
Reachability distance of p from q2 is the euclidean distance between p and q2.
Like Article
Suggest improvement
Share your thoughts in the comments
Please Login to comment...