BUS Arbitration in Computer Organization
Last Updated :
09 Apr, 2024
Introduction :
In a computer system, multiple devices, such as the CPU, memory, and I/O controllers, are connected to a common communication pathway, known as a bus. In order to transfer data between these devices, they need to have access to the bus. Bus arbitration is the process of resolving conflicts that arise when multiple devices attempt to access the bus at the same time.
When multiple devices try to use the bus simultaneously, it can lead to data corruption and system instability. To prevent this, a bus arbitration mechanism is used to ensure that only one device has access to the bus at any given time.
There are several types of bus arbitration methods, including centralized, decentralized, and distributed arbitration. In centralized arbitration, a single device, known as the bus controller, is responsible for managing access to the bus. In decentralized arbitration, each device has its own priority level, and the device with the highest priority is given access to the bus. In distributed arbitration, devices compete for access to the bus by sending a request signal and waiting for a grant signal.
Bus Arbitration refers to the process by which the current bus master accesses and then leaves the control of the bus and passes it to another bus requesting processor unit. The controller that has access to a bus at an instance is known as a Bus master.
A conflict may arise if the number of DMA controllers or other controllers or processors try to access the common bus at the same time, but access can be given to only one of those. Only one processor or controller can be Bus master at the same point in time. To resolve these conflicts, the Bus Arbitration procedure is implemented to coordinate the activities of all devices requesting memory transfers. The selection of the bus master must take into account the needs of various devices by establishing a priority system for gaining access to the bus. The Bus Arbiter decides who would become the current bus master.
Applications of bus arbitration in computer organization:
Shared Memory Systems: In shared memory systems, multiple devices need to access the memory to read or write data. Bus arbitration allows multiple devices to access the memory without interfering with each other.
Multi-Processor Systems: In multi-processor systems, multiple processors need to communicate with each other to share data and coordinate processing. Bus arbitration allows multiple processors to share access to the bus to communicate with each other and with shared memory.
Input/Output Devices: Input/Output devices such as keyboards, mice, and printers need to communicate with the processor to exchange data. Bus arbitration allows multiple input/output devices to share access to the bus to communicate with the processor and memory.
Real-time Systems: In real-time systems, data needs to be transferred between devices and memory within a specific time frame to ensure timely processing. Bus arbitration can help to ensure that data transfer occurs within a specific time frame by managing access to the bus.
Embedded Systems: In embedded systems, multiple devices such as sensors, actuators, and controllers need to communicate with the processor to control and monitor the system. Bus arbitration allows multiple devices to share access to the bus to communicate with the processor and memory.
There are two approaches to bus arbitration:
- Centralized bus arbitration –
A single bus arbiter performs the required arbitration.
- Distributed bus arbitration –
All devices participating in the selection of the next bus master.
Methods of Centralized BUS Arbitration:
There are three bus arbitration methods:
(i) Daisy Chaining method: It is a simple and cheaper method where all the bus masters use the same line for making bus requests. The bus grant signal serially propagates through each master until it encounters the first one that is requesting access to the bus. This master blocks the propagation of the bus grant signal, therefore any other requesting module will not receive the grant signal and hence cannot access the bus.
During any bus cycle, the bus master may be any device – the processor or any DMA controller unit, connected to the bus.

Advantages:
- Simplicity and Scalability.
- The user can add more devices anywhere along the chain, up to a certain maximum value.
Disadvantages:
- The value of priority assigned to a device depends on the position of the master bus.
- Propagation delay arises in this method.
- If one device fails then the entire system will stop working.
(ii) Polling or Rotating Priority method: In this, the controller is used to generate the address for the master(unique priority), the number of address lines required depends on the number of masters connected in the system. The controller generates a sequence of master addresses. When the requesting master recognizes its address, it activates the busy line and begins to use the bus.

Advantages –
- This method does not favor any particular device and processor.
- The method is also quite simple.
- If one device fails then the entire system will not stop working.
Disadvantages –
- Adding bus masters is difficult as increases the number of address lines of the circuit.
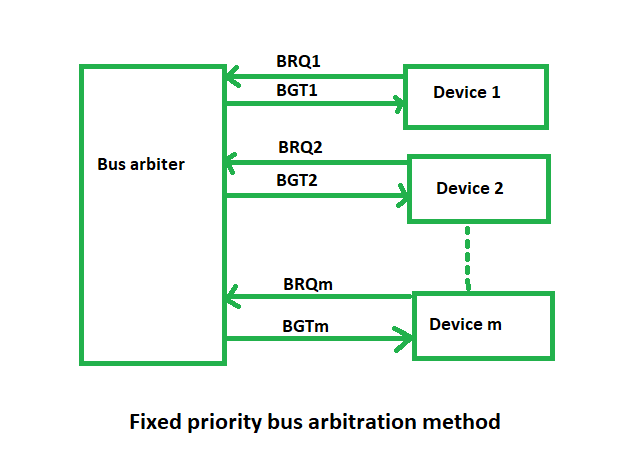
(iii) Fixed priority or Independent Request method –
In this, each master has a separate pair of bus request and bus grant lines and each pair has a priority assigned to it.
The built-in priority decoder within the controller selects the highest priority request and asserts the corresponding bus grant signal.
Advantages –
- This method generates a fast response.
Disadvantages –
- Hardware cost is high as a large no. of control lines is required.
Distributed BUS Arbitration :
In this, all devices participate in the selection of the next bus master. Each device on the bus is assigned a 4bit identification number. The priority of the device will be determined by the generated ID.
Uses of BUS Arbitration in Computer Organization :
Bus arbitration is a critical process in computer organization that has several uses and benefits, including:
- Efficient use of system resources: By regulating access to the bus, bus arbitration ensures that each device has fair access to system resources, preventing any single device from monopolizing the bus and causing system slowdowns or crashes.
- Minimizing data corruption: Bus arbitration helps prevent data corruption by ensuring that only one device has access to the bus at a time, which minimizes the risk of multiple devices writing to the same location in memory simultaneously.
- Support for multiple devices: Bus arbitration enables multiple devices to share a common communication pathway, which is essential for modern computer systems with multiple peripherals, such as printers, scanners, and external storage devices.
- Real-time system support: In real-time systems, bus arbitration is essential to ensure that high-priority tasks are executed quickly and efficiently. By prioritizing access to the bus, bus arbitration can ensure that critical tasks are given the resources they need to execute in a timely manner.
- Improved system stability: By preventing conflicts between devices, bus arbitration helps to improve system stability and reliability. This is especially important in mission-critical systems where downtime or data corruption could have severe consequences.
Issues of BUS Arbitration in Computer Organization :
Bus arbitration is a critical process in computer organization that has several uses and benefits, including:
- Efficient use of system resources: By regulating access to the bus, bus arbitration ensures that each device has fair access to system resources, preventing any single device from monopolizing the bus and causing system slowdowns or crashes.
- Minimizing data corruption: Bus arbitration helps prevent data corruption by ensuring that only one device has access to the bus at a time, which minimizes the risk of multiple devices writing to the same location in memory simultaneously.
- Support for multiple devices: Bus arbitration enables multiple devices to share a common communication pathway, which is essential for modern computer systems with multiple peripherals, such as printers, scanners, and external storage devices.
- Real-time system support: In real-time systems, bus arbitration is essential to ensure that high-priority tasks are executed quickly and efficiently. By prioritizing access to the bus, bus arbitration can ensure that critical tasks are given the resources they need to execute in a timely manner.
- Improved system stability: By preventing conflicts between devices, bus arbitration helps to improve system stability and reliability. This is especially important in mission-critical systems where downtime or data corruption could have severe consequences.
Like Article
Suggest improvement
Share your thoughts in the comments
Please Login to comment...