Appel’s Hidden Line Removal Algorithm
Last Updated :
30 Jun, 2021
Overview :
- In Hidden Surface Algorithms Taxonomy Removal the resultant object may be represented as a collection of contour lines, e.g. Appeal or Watkins’ technique, or Encarnacao’s Priority method requires to be input data as triangles, and calculates each part of the drawing in turn, from front of surface.
- In a computer representation, solid things are generally represented on polyhedra. The union of n occult intervals must be defined on face of a hidden line method Spring to A. Call. A. Call. Patrick Gilles Maillot’s thesis an expansion of the 3D hidden line deletion Bresenham line-drawing technique.
- The hidden line removal system presents a computationally quick approach. The situation of objects with curved faces is handled instead of polygons. The technique organizes curved lines spatially into many square grid cells that split drawing plane to decrease quantity of complicated geometrical calculations for line crossings. Hidden lines are divided into two categories in an algorithm and processed in several steps. On average, the algorithm reaches almost linear times.
- The hidden line elimination is used to determine which lines should not be drawn in three-dimensional image. This has always been of interest. The primary goal of the hidden line removal is to identify if a limited surface lies between point of view and line or point to be drawn and if point or line part is invisible and is not drawn.
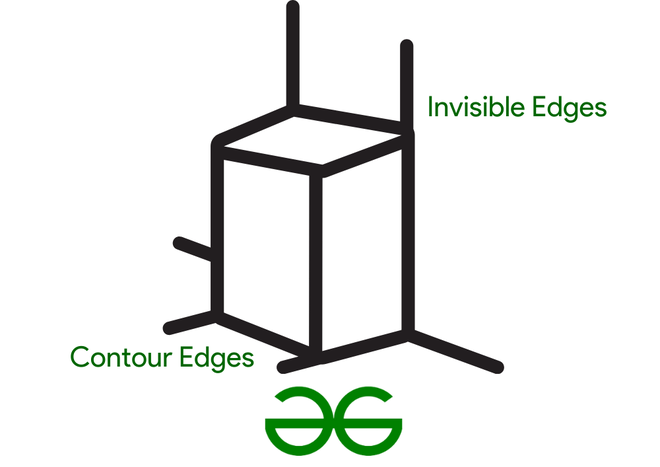
Figure 1. Understanding Appel’s Hidden Line
- The provided technique allows hidden lines to be removed from a view of concave and convex plane-facing objects on image plane. All the corners and all planes that obscure each edge point are evaluated consecutively.
The borders :
- As the number of borders square, computer time grows approximately. A decreased number of concave points takes use of algorithm and automatically detects just an item without concave points. In the latter instance, it is considerably simpler to get the outcome.
- Line Hidden Most surface algorithms may be used to eliminate the hidden line if contour of an item is shown comparable to clipping a line segment against a window. Removal of hidden line implies objects are lines modeled. Lines where surfaces intersect are produced
- Giloi’s work contains a classification of input data based on form and gives examples of methods. This categorization (four groups down to three) has been slightly simplified and algorithms identified. It is not full, some algorithms are not classified into these categories and alternative approaches are also available to classify these algorithms.
- Methods and methods such as ray tracing and radiosity on one hand and texture mapping and advanced shading models on other enabled production of photorealistic synthetic pictures.
Understanding using FORTRAN :
Many programming methods are available that are suited for haloed lines. The best code should take display, desired language of program, the available storage space and the appropriate data storage media into account. The process we have created is good, as implemented in FORTRAN, with photos on different storage sizes, printer plotters and a photo composer working on a VM/168 computer.
- Forms convexity
- Tests for concealed lines are usually good:
- Removal of faces certainly out of view
- But: Non-convex shapes problem
Note –
If the form contains numerous geometric complications, the test might fail.
Gross convexity test :
Draw straight lines between geometric inner points — do they stay in polygon?
- Determine which lines or surfaces of the items should be displayed, given a set of 3D objects and a viewing requirement.
- Other items or same object might occlude a surface (self-occlusion)
- The durations for calculations are mostly associated with the visual complexity of final picture, but depending on particular environment shown, might vary from a linear to an exponential connection to the number of input polygons.
- The execution utilizes a screen area preprocessor to construct multiple windows, each having a certain amount of polygons, to prevent unnecessary computing time.
- Each of windows is independently covered by hidden surface method.
- This strategy eliminates problems breaking up the screen resolution level by screen zone while preserving the benefits of polygon sorting method.
Like Article
Suggest improvement
Share your thoughts in the comments
Please Login to comment...